การสร้างรูปหลายเหลี่ยมแบบบังคับต้องใช้โครงสร้างที่ซับซ้อนและยุ่งยาก และไม่ได้ให้ผลลัพธ์ที่แม่นยำเพียงพอ ในกรณีเช่นนี้ พวกเขาหันไปใช้วิธีอื่น โดยแทนที่การสร้างทางเรขาคณิตด้วยการคำนวณปริมาณสเกลาร์ ซึ่งสามารถทำได้โดยการฉายแรงที่ระบุบนแกนของระบบพิกัดสี่เหลี่ยม
แกนคือเส้นตรงที่กำหนดทิศทางเฉพาะเส้นโครงของเวกเตอร์บนแกนคือปริมาณสเกลาร์ ซึ่งถูกกำหนดโดยส่วนของแกนที่ตัดออกโดยตั้งฉากที่ตกลงไปบนเวกเตอร์ตั้งแต่จุดเริ่มต้นและจุดสิ้นสุดของเวกเตอร์
การฉายภาพเวกเตอร์จะถือเป็นค่าบวก (+) หากทิศทางจากจุดเริ่มต้นของการฉายภาพไปยังจุดสิ้นสุดนั้นเกิดขึ้นพร้อมกับทิศทางที่เป็นบวกของแกน เส้นโครงเวกเตอร์จะถือเป็นลบ (-) หากทิศทางจากจุดเริ่มต้นของเส้นโครงจนถึงจุดสิ้นสุดอยู่ตรงข้ามกับทิศทางบวกของแกน
ให้เราพิจารณาหลายกรณีของแรงที่ยื่นออกมาบนแกน
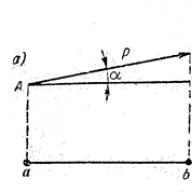
1. ให้แรง (รูปที่ 7, ก) อยู่ในระนาบเดียวกันกับแกน x. เวกเตอร์แรงสร้างมุมแหลม α โดยมีทิศทางบวกของแกน ในการค้นหาขนาดของเส้นโครง จากจุดเริ่มต้นและจุดสิ้นสุดของเวกเตอร์แรง เราจะลดตั้งฉากกับแกน x; เราได้รับ
P x = ab = P cos α. (4)
เส้นโครงของเวกเตอร์ในกรณีนี้เป็นบวก
2. ให้แรง (รูปที่ 7, ข) ซึ่งอยู่ในระนาบเดียวกันกับแกน xแต่เวกเตอร์ของมันสร้างมุมป้าน α โดยมีทิศทางบวกของแกน การฉายภาพกำลัง ถามต่อแกน xเชิงลบ
Q x = - ab = - Q cos α (5)

3. อำนาจที่ได้รับ ตั้งฉากกับแกน x(รูปที่ 7, ค) การฉายภาพกำลัง ต่อแกน xเท่ากับศูนย์ นั่นคือ N x = N cos 90° = 0.
ดังนั้น, การฉายแรงลงบนแกนพิกัดเท่ากับผลคูณของโมดูลัสของแรงและโคไซน์ของมุมระหว่างเวกเตอร์แรงกับทิศทางบวกของแกน.

แรงที่ตั้งอยู่บนเครื่องบิน xOy(รูปที่ 8) สามารถฉายภาพได้บนแกนพิกัดสองแกน วัวและ เฮ้ย. รูปนี้แสดงแรงและเส้นโครงของมัน พิกเซลและ พาย. เนื่องจากความจริงที่ว่าเส้นโครงสร้างมุมฉากจากสามเหลี่ยมมุมฉาก เอบีซีดังต่อไปนี้:
 (6)
(6)
สูตรเหล่านี้สามารถใช้เพื่อกำหนดขนาดและทิศทางของแรงเมื่อทราบเส้นโครงบนแกนพิกัด
ค1
สำหรับแผนภาพลำแสงที่กำหนด จำเป็นต้องค้นหาปฏิกิริยารองรับถ้า l=14 m, a=3.8 m, b=5 m, M=11 kN m, F=10 kN
สารละลาย. เนื่องจากไม่มีโหลดในแนวนอน ส่วนรองรับ A จึงมีเพียงปฏิกิริยาแนวตั้ง RA เท่านั้น เราเขียนสมการสมดุลในรูปแบบของโมเมนต์ของแรงทั้งหมดที่สัมพันธ์กับจุด A และ B
เราหามันได้จากที่ไหน?

ในการตรวจสอบ เรามาสร้างสมการสมดุลสำหรับแกนตั้งกันดีกว่า:
คำถามควบคุม
จุดแรงบานพับคาน
การฉายแรงบนแกนเป็นอย่างไร?
การฉายภาพของแรงบนแกนเป็นปริมาณพีชคณิตเท่ากับผลคูณของโมดูลัสแรงและโคไซน์ของมุมระหว่างทิศทางบวกของแกนกับเวกเตอร์แรง (นั่นคือ เป็นส่วนที่ถูกพล็อตโดยแรงบน แกนที่สอดคล้องกัน)
Px= P cos?= P cos90o=0;
Rx=R เพราะอะไร? = -R cos(180o-?)

เส้นโครงของแรงบนแกนเป็นบวก ดังรูปที่ 1 2 ก) ถ้า 0 ? ?< ?/2.
เส้นโครงของแรงบนแกนเท่ากับศูนย์ในกรณีใด
การฉายแรงบนแกนสามารถเท่ากับศูนย์ได้ 2 ข) ถ้า? = ?/2.)
ในกรณีใดที่เส้นโครงของแรงบนแกนเท่ากับโมดูลัสของแรง?
เส้นโครงของแรงบนแกนเท่ากับขนาดของแรง ? =0?.
เส้นโครงของแรงบนแกนเป็นลบในกรณีใด
การฉายแรงลงบนแกนอาจเป็นลบได้ รูปที่ 1 2 ค) ถ้า?/2< ? ? ?.
ระบบแรงบรรจบกันของระนาบมีสมการสมดุลจำนวนเท่าใดที่รวบรวมได้
กองกำลังจะถูกเรียกว่าการมาบรรจบกันหากแนวการกระทำของพวกมันตัดกันที่จุดหนึ่ง ระบบระนาบของแรงที่มาบรรจบกันจะแตกต่างเมื่อแนวการกระทำของแรงทั้งหมดนี้อยู่ในระนาบเดียวกัน
ความสมดุลของระบบแรงที่มาบรรจบกัน
จากกฎของกลศาสตร์ วัตถุที่แข็งกระด้างซึ่งกระทำโดยแรงภายนอกที่สมดุลซึ่งกันและกัน ไม่เพียงแต่จะอยู่นิ่งเท่านั้น แต่ยังทำให้เกิดการเคลื่อนไหวด้วย ซึ่งเราจะเรียกว่าการเคลื่อนไหว "โดยความเฉื่อย" การเคลื่อนไหวดังกล่าวจะเป็น เช่น การเคลื่อนไหวไปข้างหน้าสม่ำเสมอและการเคลื่อนไหวเป็นเส้นตรงของร่างกาย
จากที่นี่เราได้ข้อสรุปที่สำคัญสองประการ:
1) สภาวะของสมดุลสถิตจะพึงพอใจโดยแรงที่กระทำต่อทั้งวัตถุที่อยู่นิ่งและบนวัตถุที่เคลื่อนที่ "โดยความเฉื่อย"
2) ความสมดุลของแรงที่กระทำต่อวัตถุแข็งอิสระเป็นเงื่อนไขที่จำเป็นแต่ไม่เพียงพอสำหรับความสมดุล (ส่วนที่เหลือ) ของร่างกาย ร่างกายจะสงบก็ต่อเมื่อได้พักและจนกว่าจะถึงช่วงที่มีการใช้กำลังที่สมดุลกับร่างกาย
เพื่อความสมดุลของระบบแรงที่มาบรรจบกันที่กระทำกับวัตถุที่เป็นของแข็ง จำเป็นและเพียงพอที่ผลลัพธ์ของแรงเหล่านี้จะเท่ากับศูนย์ เงื่อนไขที่แรงต้องตอบสนองสามารถแสดงในรูปแบบเรขาคณิตหรือการวิเคราะห์ได้
1. สภาวะสมดุลทางเรขาคณิต เนื่องจากผลลัพธ์ของแรงที่มาบรรจบกันถูกกำหนดให้เป็นด้านปิดของรูปหลายเหลี่ยมแรงที่สร้างจากแรงเหล่านี้ มันจึงสามารถหายไปได้ก็ต่อเมื่อจุดสิ้นสุดของแรงสุดท้ายในรูปหลายเหลี่ยมเกิดขึ้นพร้อมกับจุดเริ่มต้นของรูปหลายเหลี่ยมอันแรก กล่าวคือ เมื่อรูปหลายเหลี่ยมนั้น ปิด
ด้วยเหตุนี้ เพื่อให้ระบบอยู่ในสภาวะสมดุล แรงที่มาบรรจบกันจึงมีความจำเป็นและเพียงพอสำหรับแรงรูปหลายเหลี่ยมที่สร้างจากแรงเหล่านี้ที่จะปิด
2. สภาวะสมดุลเชิงวิเคราะห์ ในเชิงวิเคราะห์ ผลลัพธ์ของระบบแรงที่มาบรรจบกันจะถูกกำหนดโดยสูตร
เนื่องจากผลรวมของพจน์บวกอยู่ใต้ราก ดังนั้น R จะเป็นศูนย์เมื่อพร้อมๆ กันเท่านั้น
นั่นคือเมื่อแรงที่กระทำต่อร่างกายตอบสนองความเท่าเทียมกัน:
ความเท่าเทียมกันแสดงเงื่อนไขของความสมดุลในรูปแบบการวิเคราะห์: เพื่อให้สมดุลของระบบเชิงพื้นที่ของกองกำลังที่มาบรรจบกันอยู่ในสภาวะสมดุล จำเป็นและเพียงพอที่ผลรวมของเส้นโครงของแรงเหล่านี้ไปยังแต่ละแกนพิกัดทั้งสามแกนจะเท่ากับ ศูนย์.
หากแรงที่มาบรรจบกันทั้งหมดที่กระทำต่อวัตถุอยู่ในระนาบเดียวกัน แรงเหล่านั้นก็จะก่อตัวเป็นระบบแรงที่มาบรรจบกันแบบเรียบ ในกรณีของระบบราบที่มีแรงมาบรรจบกัน เราจะได้สภาวะสมดุลเพียงสองสภาวะเท่านั้น
ความเท่าเทียมกันยังแสดงถึงเงื่อนไข (หรือสมการ) ที่จำเป็นต่อความสมดุลของวัตถุแข็งเกร็งอิสระภายใต้การกระทำของแรงที่มาบรรจบกัน
ปฏิกิริยาของแกนที่มีปลายบานพับมุ่งไปในทิศทางใด?
ให้การเชื่อมต่อในโครงสร้างบางส่วนเป็นแท่ง AB ยึดที่ปลายด้วยบานพับ (รูปที่ 3) สมมติว่าน้ำหนักของไม้วัดสามารถละเลยได้เมื่อเทียบกับน้ำหนักที่รับรู้ จากนั้นจะมีแรงเพียงสองแรงที่ใช้กับบานพับ A และ B เท่านั้นที่จะกระทำบนแกน แต่ถ้าแกน AB อยู่ในภาวะสมดุลแล้วแรงที่ใช้ที่จุด A และ B ควรมุ่งไปตามเส้นตรงเส้นเดียวนั่นคือ ตามแนวแกนของแกน ดังนั้นแท่งที่รับน้ำหนักที่ปลายซึ่งสามารถละเลยน้ำหนักได้เมื่อเปรียบเทียบกับน้ำหนักเหล่านี้ ทำงานได้เฉพาะในแรงดึงหรือแรงอัดเท่านั้น หากแท่งดังกล่าวเป็นตัวเชื่อม ปฏิกิริยาของแท่งนั้นจะพุ่งไปตามแกนของแท่ง

โมเมนต์ของแรงสัมพันธ์กับจุดอย่างไร
โมเมนต์ของแรงที่สัมพันธ์กับจุดหนึ่งถูกกำหนดโดยผลคูณของโมดูลัสของแรงและความยาวของฉากตั้งฉากลดลงจากจุดหนึ่งไปยังแนวการกระทำของแรง (รูปที่ 4, a) เมื่อวัตถุได้รับการแก้ไขที่จุด O แรงมีแนวโน้มที่จะหมุนรอบจุดนี้ จุด O ที่ใช้โมเมนต์นั้นเรียกว่าจุดศูนย์กลางของโมเมนต์ และความยาวของเส้นตั้งฉาก a เรียกว่าแขนของแรงสัมพันธ์กับศูนย์กลางของโมเมนต์

โมเมนต์ของแรงวัดเป็นนิวตันอมิเตอร์ (N·m) หรือกิโลกรัมเมตร (kgf·m) หรือเป็นทวีคูณและมัลติเพิลย่อยที่สอดคล้องกัน รวมถึงโมเมนต์ของโมเมนต์คู่
โมเมนต์ของแรงรอบจุดหนึ่งมีค่าเท่ากับศูนย์ในกรณีใด
เมื่อแนวแรงกระทำผ่านจุดที่กำหนด โมเมนต์ของมันสัมพันธ์กับจุดนี้เท่ากับศูนย์ เนื่องจากในกรณีที่พิจารณาไหล่จะเท่ากับศูนย์: a = 0 (รูปที่ 4, c)
มีสมการสมดุลจำนวนเท่าใดที่รวบรวมไว้สำหรับระบบแรงตามอำเภอใจของระนาบ
สำหรับระบบแรงตามอำเภอใจแบบแบน สมการสมดุลสามแบบสามารถสร้างขึ้นได้:
ปฏิกิริยามุ่งตรงไปที่ข้อต่อคงที่อย่างไร?

ส่วนรองรับบานพับคงที่ (รูปที่ 5 ส่วนรองรับ B) ปฏิกิริยาของการรองรับดังกล่าวจะผ่านแกนบานพับและสามารถมีทิศทางใดก็ได้ในระนาบของการวาดภาพ เมื่อแก้ไขปัญหา เราจะพรรณนาถึงปฏิกิริยาตามส่วนประกอบและตามทิศทางของแกนพิกัด หากหลังจากแก้ไขปัญหาแล้วเราพบแล้วปฏิกิริยาก็จะถูกกำหนดด้วย โมดูโล่
ปฏิกิริยามุ่งตรงไปที่ข้อต่อที่กำลังเคลื่อนที่อย่างไร?
ส่วนรองรับแบบบานพับที่เคลื่อนย้ายได้ (รูปที่ 6 ส่วนรองรับ A) ป้องกันไม่ให้ร่างกายเคลื่อนที่ไปในทิศทางที่ตั้งฉากกับระนาบเลื่อนของส่วนรองรับเท่านั้น ปฏิกิริยาของส่วนรองรับดังกล่าวจะถูกส่งไปยังพื้นผิวตามปกติซึ่งลูกกลิ้งของส่วนรองรับแบบเคลื่อนย้ายได้พักอยู่
การแก้ปัญหาสมดุลของแรงที่มาบรรจบกันโดยการสร้างรูปหลายเหลี่ยมแรงปิดนั้นเกี่ยวข้องกับโครงสร้างที่ยุ่งยาก วิธีการสากลในการแก้ปัญหาดังกล่าวคือการกำหนดเส้นโครงของแรงที่กำหนดบนแกนพิกัดและดำเนินการโดยใช้เส้นโครงเหล่านี้ แกนคือเส้นตรงที่กำหนดทิศทางเฉพาะ
เส้นโครงของเวกเตอร์บนแกนคือปริมาณสเกลาร์ ซึ่งกำหนดโดยส่วนของแกนที่ตัดออกโดยเส้นตั้งฉากที่ตกลงไปบนเวกเตอร์ตั้งแต่จุดเริ่มต้นและจุดสิ้นสุดของเวกเตอร์
การฉายภาพเวกเตอร์จะถือเป็นค่าบวกหากทิศทางจากจุดเริ่มต้นของการฉายภาพไปยังจุดสิ้นสุดนั้นเกิดขึ้นพร้อมกับทิศทางที่เป็นบวกของแกน เส้นโครงเวกเตอร์จะถือเป็นลบหากทิศทางจากจุดเริ่มต้นของเส้นโครงไปยังจุดสิ้นสุดนั้นอยู่ตรงข้ามกับทิศทางบวกของแกน
ดังนั้น การฉายแรงลงบนแกนพิกัดจะเท่ากับผลคูณของโมดูลัสแรงและโคไซน์ของมุมระหว่างเวกเตอร์แรงกับทิศทางบวกของแกน
ลองพิจารณาหลายกรณีของแรงที่ฉายลงบนแกน:
เวกเตอร์แรง เอฟ(รูปที่ 15) สร้างมุมแหลมโดยมีทิศทางบวกของแกน x

ในการค้นหาเส้นโครง จากจุดเริ่มต้นและจุดสิ้นสุดของเวกเตอร์แรง เราจะลดตั้งฉากกับแกนลง โอ้; เราได้รับ
1. เอฟเอ็กซ์ = เอฟ cos α
เส้นโครงของเวกเตอร์ในกรณีนี้เป็นบวก
บังคับ เอฟ(รูปที่ 16) มีทิศทางบวกของแกน เอ็กซ์มุมป้าน α

แล้ว เอฟ x= เอฟ cos α แต่เนื่องจาก α = 180 0 - φ
เอฟ x= เอฟ cos α = เอฟ cos180 0 - φ =- เอฟเพราะφ
การฉายภาพกำลัง เอฟต่อแกน โอ้ในกรณีนี้มันเป็นค่าลบ
บังคับ เอฟ(รูปที่ 17) ตั้งฉากกับแกน โอ้.

การฉายแรง F ไปที่แกน เอ็กซ์เท่ากับศูนย์
เอฟ x= เอฟเพราะ 90° = 0
แรงที่ตั้งอยู่บนเครื่องบิน ฮาววี่(รูปที่ 18) สามารถฉายลงบนแกนพิกัดสองแกนได้ โอ้และ อู๋.

ความแข็งแกร่ง เอฟสามารถแบ่งออกเป็นองค์ประกอบได้: เอฟ x และ เอฟย. โมดูลเวกเตอร์ เอฟ x เท่ากับเส้นโครงของเวกเตอร์ เอฟต่อแกน วัวและโมดูลัสเวกเตอร์ เอฟ y เท่ากับเส้นโครงของเวกเตอร์ เอฟต่อแกน โอ้.
จาก ∆ โอเอวี: เอฟ x= เอฟเพราะอัลฟ่า, เอฟ x= เอฟบาป α
จาก ∆ โอเอเอส: เอฟ x= เอฟเพราะφ, เอฟ x= เอฟบาป φ
ขนาดของแรงสามารถพบได้โดยใช้ทฤษฎีบทพีทาโกรัส:
![]()
เส้นโครงของผลรวมเวกเตอร์หรือผลลัพธ์บนแกนใดๆ เท่ากับผลรวมพีชคณิตของเส้นโครงของผลรวมของเวกเตอร์บนแกนเดียวกัน
พิจารณากองกำลังที่มาบรรจบกัน เอฟ 1 , เอฟ 2 , เอฟ 3 และ เอฟ 4, (รูปที่ 19, ก) ผลรวมเรขาคณิตหรือผลลัพธ์ของแรงเหล่านี้ เอฟกำหนดโดยด้านปิดของรูปหลายเหลี่ยมแรง


ให้เราปล่อยจากจุดยอดของรูปหลายเหลี่ยมแรงไปที่แกน xตั้งฉาก
เมื่อพิจารณาถึงการคาดการณ์แรงที่ได้รับโดยตรงจากการก่อสร้างที่เสร็จสมบูรณ์แล้ว
เอฟ= เอฟ 1x+ เอฟ 2x+ เอฟ 3x+ เอฟ 4x
โดยที่ n คือจำนวนเทอมเวกเตอร์ เส้นโครงของพวกเขาเข้าสู่สมการข้างต้นพร้อมกับเครื่องหมายที่เกี่ยวข้อง
ในระนาบ ผลรวมทางเรขาคณิตของแรงสามารถฉายบนแกนพิกัดสองแกน และในอวกาศ ตามลำดับ บนสามแกน
วิธีการวิเคราะห์สำหรับการแก้ปัญหาสถิตยศาสตร์มีพื้นฐานมาจากแนวคิดของการฉายแรงลงบนแกน เส้นโครงของแรง (เช่นเดียวกับเวกเตอร์อื่นๆ) บนแกนเป็นปริมาณพีชคณิตเท่ากับผลคูณของขนาดของแรงและโคไซน์ของมุมระหว่างแรงกับทิศทางบวกของแกน
ถ้ามุมนี้แหลม เส้นโครงจะเป็นบวก ถ้ามุมป้าน เป็นลบ และถ้าแรงตั้งฉากกับแกน เส้นโครงบนแกนจะเป็นศูนย์ ดังนั้น สำหรับแรงที่แสดงในรูป 18,
เส้นโครงของแรง F บนระนาบคือเวกเตอร์ที่อยู่ระหว่างเส้นโครงของจุดเริ่มต้นและจุดสิ้นสุดของแรง F บนระนาบนี้ (รูปที่ 19) ดังนั้น ตรงกันข้ามกับการฉายแรงบนแกน การฉายแรงบนระนาบนั้นเป็นปริมาณเวกเตอร์ เนื่องจากไม่เพียงแต่มีลักษณะเฉพาะด้วยค่าตัวเลขเท่านั้น แต่ยังรวมถึงทิศทางในระนาบด้วย โมดูโล่อยู่ที่ไหน มุมระหว่างทิศทางของแรง F กับการฉายภาพ
ในบางกรณี หากต้องการหาเส้นโครงของแรงบนแกน จะสะดวกกว่าหากหาเส้นโครงบนระนาบที่แกนนี้อยู่ก่อน แล้วจึงฉายเส้นโครงที่พบบนระนาบบนแกนนี้ ตัวอย่างเช่น ในกรณีที่แสดงในรูปที่. 19 เราพบเช่นนั้น
วิธีการวิเคราะห์การระบุแรง ในการระบุแรงในการวิเคราะห์ จำเป็นต้องเลือกระบบพิกัดแกน Oxyz ซึ่งสัมพันธ์กับทิศทางของแรงในอวกาศที่จะถูกกำหนด



ในกลศาสตร์ เราจะใช้ระบบพิกัดทางขวามือ กล่าวคือ ระบบที่การจัดแนวแกนกับแกนสั้นที่สุดเกิดขึ้นเมื่อมองจากปลายด้านบวกของแกนทวนเข็มนาฬิกา (รูปที่ 20)
เวกเตอร์ที่แทนแรง F สามารถสร้างขึ้นได้หากทราบโมดูลัสของแรงนี้และมุมที่แรงก่อตัวพร้อมกับแกนพิกัด ดังนั้น ปริมาณจะกำหนดแรง F จุด A ของการใช้แรงจะต้องระบุแยกกันตามพิกัดของมัน
ในการแก้ปัญหาของกลศาสตร์ จะสะดวกกว่าในการระบุแรงโดยการฉายลงบนแกนพิกัด เมื่อทราบเส้นโครงเหล่านี้ คุณสามารถกำหนดโมดูลัสของแรงและมุมที่เกิดขึ้นกับแกนพิกัดได้โดยใช้สูตร:
หากแรงทั้งหมดที่พิจารณาอยู่ในระนาบเดียวกัน แรงแต่ละแรงสามารถระบุได้ด้วยการฉายภาพลงบนสองแกน จากนั้น สูตรที่กำหนดแรงจากการฉายภาพจะอยู่ในรูปแบบ:
วิธีวิเคราะห์การเพิ่มแรง การเปลี่ยนจากการพึ่งพาระหว่างเวกเตอร์เป็นการพึ่งพาระหว่างการฉายภาพนั้นดำเนินการโดยใช้ทฤษฎีบทเรขาคณิตต่อไปนี้: การฉายภาพเวกเตอร์ผลรวมบนแกนใด ๆ เท่ากับผลรวมพีชคณิตของการฉายภาพเวกเตอร์ผลรวมบนแกนเดียวกัน ตามทฤษฎีบทนี้ ถ้า R คือผลรวมของแรงแล้ว
เมื่อรู้จากสูตร (6) เราพบว่า:
สูตร (8), (9) ช่วยให้เราสามารถแก้ปัญหาการบวกแรงในเชิงวิเคราะห์ได้
สำหรับแรงที่อยู่ในระนาบเดียว สูตรที่เกี่ยวข้องจะอยู่ในรูปแบบ:
หากแรงได้รับจากโมดูลและมุมด้วยแกน ดังนั้นเพื่อใช้วิธีการวิเคราะห์ของการบวก จำเป็นต้องคำนวณการฉายภาพของแรงเหล่านี้ลงบนแกนพิกัดก่อน
บ่อยครั้ง เรขาคณิตจำเป็นต้องมีการบวกเวกเตอร์แรง ซับซ้อนและยุ่งยากการก่อสร้าง ในกรณีเช่นนี้พวกเขาหันไปใช้ ไปที่อื่นวิธีการก่อสร้างทางเรขาคณิต แทนที่เกี่ยวกับการคำนวณ สเกลาร์ปริมาณ นี่คือความสำเร็จ โดยฉายแรงที่ระบุบนแกนของระบบพิกัดสี่เหลี่ยม
ดังที่ทราบกันดีจากคณิตศาสตร์ แกนเรียกว่า เส้นตรงไม่จำกัดซึ่งแน่นอนว่า ทิศทาง. การฉายภาพเวกเตอร์บนแกนเป็น สเกลาร์ค่าที่กำหนด ส่วนแกน, ตัดออก ตั้งฉากละเว้น จากจุดเริ่มต้นและจุดสิ้นสุดของเวกเตอร์บนแกน
การพิจารณาการฉายภาพเวกเตอร์ เชิงบวก (+ ) หากทิศทางมาจากจุดเริ่มต้นของการฉายภาพจนถึงจุดสิ้นสุด ไม้ขีดโดยมีทิศทางแกนบวก การพิจารณาการฉายภาพเวกเตอร์ เชิงลบ (- ) หากทิศทางมาจากจุดเริ่มต้นของการฉายภาพจนถึงจุดสิ้นสุด ตรงข้ามทิศทางบวกของแกน
พิจารณาซีรีส์ กรณีการออกแบบแรงบนแกน.
- เมื่อได้รับอำนาจแล้ว ร (ข้าว. ก ) อยู่ในระนาบเดียวกันกับแกน เอ็กซ์ . เวกเตอร์แรงสร้างมุมแหลมโดยมีทิศทางบวกของแกน α .
เพื่อหาค่า การคาดการณ์จากจุดเริ่มต้นและจุดสิ้นสุดของเวกเตอร์แรง เราจะลดตั้งฉากกับแกนลง เอ็กซ์, เราได้รับ
Р x = ab = Р cos α .
เส้นโครงของเวกเตอร์ในกรณีนี้ เชิงบวก.
2. อำนาจที่ได้รับ ถาม (ข้าว. ข ) ซึ่งอยู่ในระนาบเดียวกันกับแกน เอ็กซ์ แต่เวกเตอร์ของมันสร้างมุมป้านโดยมีทิศทางบวกของแกน α .

การฉายภาพกำลัง ถาม ต่อแกน เอ็กซ์
Q x = ab = Q cos α,
เพราะ = - cos β .
เพราะ α > 90° แล้ว cos เพราะ α - เชิงลบขนาด. มีการแสดงออก เพราะ α ผ่าน เพราะβ (β - มุมแหลม) ในที่สุดเราก็ได้
Q x = - Q cos β
ในกรณีนี้คือเส้นโครงของแรง เชิงลบ.
ดังนั้น, การฉายแรงลงบนแกน พิกัดจะเท่ากับ ผลคูณของโมดูลัสแรงและโคไซน์ของมุมระหว่างเวกเตอร์แรงกับทิศทางบวกของแกน.
เมื่อพิจารณาการฉายภาพของเวกเตอร์แรงบนแกน มักใช้โคไซน์ เฉียบพลันมุมโดยไม่คำนึงถึงทิศทางของแกน - บวกหรือลบ - มันถูกสร้างขึ้น เข้าสู่ระบบการฉายภาพจะติดตั้งได้ง่ายกว่าโดยตรง ตามรูปวาด
แรงที่ตั้งอยู่บนเครื่องบิน xOy สามารถฉายภาพลงบนแกนพิกัดสองแกนได้ โอ้ และ อู๋ . มาดูภาพวาดกัน

มันแสดงให้เห็นถึงความแข็งแกร่ง ร และการคาดการณ์ อาร์เอ็กซ์ และ ร . เนื่องจากความจริงที่ว่าการคาดการณ์เกิดขึ้นระหว่างกัน ตรงมุมจากสามเหลี่ยมมุมฉาก เอบีซี ดังต่อไปนี้: