ภาพรวมสภาวะหุ่นยนต์ในเวชศาสตร์ฟื้นฟู
1. การจำแนกประเภทของหุ่นยนต์ทางการแพทย์
เพื่อจัดระบบระบบหุ่นยนต์ (RTS) ที่รู้จักและเป็นไปได้ในทางการแพทย์ จึงได้มีการเสนอการจำแนกประเภทต่างๆ เป็นสัญญาณของการจำแนกประเภท มีการใช้สิ่งต่อไปนี้: การรุกรานของขั้นตอน ความปลอดภัย ความคล่องตัว การยศาสตร์ การควบคุมเป็นการจัดการหรือการวินิจฉัย หนึ่งในตัวเลือกการจำแนกประเภทโดยคำนึงถึงความก้าวหน้าล่าสุดในวิทยาการหุ่นยนต์ทางการแพทย์แสดงไว้ในรูปที่ 1 สามประเภทหลักคือหุ่นยนต์เวชศาสตร์ฟื้นฟู หุ่นยนต์ช่วยชีวิต และหุ่นยนต์ผ่าตัด บำบัด และวินิจฉัย พวกเขาเป็นตัวแทนของพื้นที่หลักของหุ่นยนต์ทางการแพทย์ แม้ว่าคลาสเหล่านี้และคลาสย่อยจะไม่เป็นอิสระจากสาเหตุที่ระบุไว้ข้างต้น นอกจากนี้ ในส่วนที่ 3 - 5 จะพิจารณาตัวแทนของคลาสย่อยของยาฟื้นฟูที่ระบุในการจัดหมวดหมู่
มะเดื่อ 1
2. แนวคิดของการพัฒนาและการนำหุ่นยนต์มาใช้ในเวชศาสตร์ฟื้นฟูสำหรับคนรักสุขภาพ
เวชศาสตร์ฟื้นฟูเป็นระบบของกิจกรรมทางการแพทย์ที่มีเป้าหมายเพื่อวินิจฉัยปริมาณสำรองที่ใช้งานได้ การบำรุงรักษาและการฟื้นฟูสุขภาพของมนุษย์ผ่านการปรับปรุงสุขภาพและการฟื้นฟูสมรรถภาพทางการแพทย์ การปรับปรุงสุขภาพควรเข้าใจว่าเป็นชุดของมาตรการป้องกันที่มุ่งฟื้นฟูการสำรองการทำงานที่ลดลงและความสามารถในการปรับตัวของร่างกายในบุคคลที่มีสุขภาพดีในทางปฏิบัติ บทบาทพิเศษของยาป้องกันถูกตั้งข้อสังเกตโดย I.P. ผู้ได้รับรางวัลโนเบล พาฟลอฟ (รูปที่ 2). ตามเขา: "ยาป้องกันบรรลุเป้าหมายทางสังคมเฉพาะในกรณีที่เปลี่ยนจากการแพทย์ทางพยาธิวิทยาเป็นการแพทย์ของคนที่มีสุขภาพดี"

มะเดื่อ 2
แนวความคิดของเวชศาสตร์ฟื้นฟูแตกต่างไปจากแนวคิดของการฟื้นฟูสมรรถภาพทางการแพทย์ซึ่งเป็นมาตรการที่ซับซ้อนในการวินิจฉัยและการรักษาและป้องกันโรคที่มุ่งเป้าไปที่การฟื้นฟูหรือชดเชยการทำงานที่บกพร่องของร่างกายมนุษย์และความสามารถในการทำงานของผู้ป่วยและผู้ทุพพลภาพ
การฟื้นฟูสมรรถภาพคือการรวมผลการรักษาในกระบวนการฟื้นตัวของผู้ป่วยหลังการเจ็บป่วย ซึ่งแตกต่างจากการฟื้นฟูสมรรถภาพซึ่งช่วยฟื้นฟูสุขภาพของผู้ป่วย ยาฟื้นฟูมีจุดมุ่งหมายเพื่อสร้างสำรองสุขภาพที่สูญเสียไป คลังแสงสำหรับการรักษาและปรับปรุงสุขภาพของเวชศาสตร์ฟื้นฟูช่วยให้บุคคลมีกิจกรรมทางสังคมและความคิดสร้างสรรค์ในอาชีพของเขานั่นคือความสามารถในการทำงานในสภาพที่กิจกรรมทางวิชาชีพของเขาเกิดขึ้น การฟื้นฟูสมรรถภาพมุ่งเน้นไปที่พยาธิสภาพของอวัยวะเป็นหลักและด้วยเหตุนี้อุปกรณ์เกณฑ์จึงประเมินระดับของการกลับคืนสู่ภาวะปกติ เครื่องมือระเบียบวิธีของเวชศาสตร์ฟื้นฟูกำลังเปลี่ยนเส้นทางจากการค้นหาอาการของโรคไปจนถึงการประเมินความสามารถในการทำงานสำรองของร่างกายอย่างแม่นยำกับภาระเหล่านั้นสภาพการทำงานที่บุคคลทำงาน
แนวคิดของการพัฒนาด้านการแพทย์และวิทยาศาสตร์การแพทย์ในสหพันธรัฐรัสเซียจนถึงปี 2010 นั้นอิงจากแบบจำลองที่เน้นด้านสุขภาพของระบบการดูแลสุขภาพที่พัฒนาโดยศูนย์วิทยาศาสตร์คอมพิวเตอร์และจุลชีววิทยาแห่งรัสเซียภายใต้การนำของนักวิชาการ AN Razumov (รูปที่ 3). แก่นแท้ของแบบจำลองนี้คือการเน้นที่การรักษาสุขภาพของบุคคลที่มีสุขภาพดี และด้วยเหตุนี้ ยาฟื้นฟู

มะเดื่อ 3
ในอนาคต งานวิจัยส่วนใหญ่ในเอกสารฉบับนี้จะเกี่ยวข้องกับกลุ่มผู้บาดเจ็บจากการปฏิบัติการทางทหาร ที่ทำงาน กีฬา สมองพิการในวัยแรกเกิด ผู้ป่วยหลังโรคหลอดเลือดสมอง แต่ยังรวมถึงคนที่มีสุขภาพแข็งแรง เหนื่อยล้าจากการทำงาน และกิจกรรมทางจิตและลดความสามารถในการทำงานของพวกเขา ตัวอย่างเช่นอาจารย์มหาวิทยาลัยและนักศึกษา เป็นการเหมาะสมที่จะพูดเกี่ยวกับระบบการศึกษาแบบเข้มข้นที่กำลังพัฒนาในปัจจุบัน ซึ่งเพื่อเพิ่มประสิทธิภาพในการสอนนั้น เกี่ยวข้องกับความเข้มข้นของความพยายามของทั้งนักเรียนและครูโดยไม่กระทบกระเทือนถึงสุขภาพ สำหรับพวกเขาจำเป็นต้องมียาฟื้นฟูที่พิจารณาในเอกสาร
เวชศาสตร์ฟื้นฟูประกอบด้วยการบำบัดหลายอย่าง รวมถึงการรักษาที่ไม่ใช่ยา ซึ่งหนึ่งในประเภทคือการบำบัดด้วยกลไก ในบรรดาวิธีการต่างๆ ที่เป็นที่รู้จักของกลไกบำบัด วิทยาการหุ่นยนต์มีศักยภาพสูงสุด
นักวิทยาศาสตร์ชาวรัสเซีย N.V. Zabludovsky (รูปที่ 4) “เราไม่สามารถใช้ประโยชน์จากการปรับปรุงกลไกเพื่อสร้างเครื่องจักรที่แทนที่การกระทำของมือ หรือแม้แต่การกระทำของเครื่องจักรก็ยังดีกว่าการกระทำของมือ? มันคุ้มค่าที่จะประดิษฐ์เครื่องจักรซึ่งความแข็งแกร่งของมันสามารถกำหนดได้เป็นตัวเลขทุกช่วงเวลาและแทนที่จะทำงานของหมอนวดซึ่งขึ้นอยู่กับความรู้สึกของกล้ามเนื้อส่วนตัวเพื่อจัดการกับงานที่แสดงเป็นตัวเลข กล่าวอีกนัยหนึ่งแทนที่จะใช้ปริมาณของยาด้วยตาให้ชั่งน้ำหนักด้วยความสมดุลที่แม่นยำ "

มะเดื่อ 4
ในสมัยนั้นมันเป็นจินตนาการและนักวิทยาศาสตร์เพียงฝันถึงความเป็นไปได้ที่จะเติมเอฟเฟกต์ให้กับฮาร์ดแวร์แห่งอนาคต ทุกวันนี้ ความฝันของผู้ทำนายที่ยอดเยี่ยมสามารถเกิดขึ้นได้ด้วยการเปลี่ยนไปใช้หุ่นยนต์อัจฉริยะที่ปรับตัวได้ขั้นสูง ปัญหาด้านการแพทย์ประการแรกคือการพัฒนาแนวคิดของ N.V. Zabludovsky เกี่ยวกับแนวทางใหม่ในการวัฒนธรรมทางกายภาพของมนุษย์ซึ่งไม่เพียง แต่การเคลื่อนไหวตามอำเภอใจและเชิงรับเท่านั้น แต่ยังรวมถึงการนวดด้วย การนวดสามารถมีได้ทั้งการผ่อนคลายและการเคลื่อนไหว ด้วยการผสมผสานที่ดีที่สุดของการทำงานเหล่านี้ วัฒนธรรมทางกายภาพสามารถมีส่วนช่วยในการอนุรักษ์และเพิ่มปริมาณสำรองด้านสุขภาพ และเพิ่มประสิทธิภาพในการทำงานทางร่างกายและจิตใจ
ดังนั้นสาระสำคัญของแนวคิดของการพัฒนาและการนำหุ่นยนต์ไปใช้ใน VM สำหรับคนที่มีสุขภาพคือการใช้หุ่นยนต์อัจฉริยะที่ปรับตัวได้ร่วมกับการบำบัดประเภทอื่น ๆ ได้แก่ อะโรมาติก melo- จิตบำบัดเพื่อรักษาปริมาณสำรองด้านสุขภาพที่เพิ่มขึ้น เพื่อเพิ่มขีดความสามารถในการทำงาน
แน่นอนว่าระบบหุ่นยนต์เป็นเครื่องมืออัตโนมัติ ทำงานโดยอัตโนมัติเพียงชั่วคราว เชื่อฟังบุคคลที่อยู่ในระดับของการตัดสินใจที่ซับซ้อนและมีความชาญฉลาด ไม่ใช่แค่ผู้ช่วยทางกายภาพเท่านั้น
ตามการจำแนกประเภทที่เสนอข้างต้น การทบทวนสถานะของหุ่นยนต์สำหรับเวชศาสตร์ฟื้นฟูได้ดำเนินการในสามด้าน: การจัดการข้อต่อหรือการเคลื่อนไหวของแขนขาในข้อต่อ การจัดการกับเนื้อเยื่ออ่อนเช่น การนวดที่หลากหลาย ขาเทียมที่ใช้งานและควบคุมทางชีวภาพ
3. หุ่นยนต์สำหรับเคลื่อนไหวแขนขาในข้อต่อ
การเคลื่อนไหวของแขนขาในข้อต่อด้วยมือของแพทย์มีการใช้กันอย่างแพร่หลายในด้านกีฬา, เวชศาสตร์ฟื้นฟู, ในการรักษาและการศึกษาของผู้ป่วยที่มีผลของโรคหลอดเลือดสมอง, สมองพิการ การเคลื่อนไหวแบบพาสซีฟและแอคทีฟของแขนขาในข้อต่อมักจะทำร่วมกับการนวด รวมถึงเพื่อการพักผ่อนหย่อนใจ กลไกบำบัดแทนที่มือของแพทย์ด้วยมือของหุ่นยนต์ ผลงานชิ้นแรกบางชิ้นที่นำเสนอหุ่นยนต์หกไดรฟ์สำหรับนวดและการเคลื่อนไหวของแขนขาในข้อต่อปรากฏขึ้นในปี 1997 ... ต่อมา หุ่นยนต์ไดรฟ์เดียวของบริษัท Biodex ของอเมริกา บริษัท Con-Trex ของสวิส และหุ่นยนต์สี่ไดรฟ์ของบริษัท Lokomat ของสวิสก็ปรากฏตัวขึ้น
หุ่นยนต์ของ บริษัท สวิส "Lokomat" เป็นตัวแทนที่โดดเด่นที่สุดของคลาสย่อยของหุ่นยนต์ฟื้นฟูสมรรถภาพสำหรับการเคลื่อนไหวแขนขาในข้อต่อสะโพกเข่าและข้อเท้า มีแนวคิดของ neuroplasticity ซึ่งหมายถึง "การกำหนดงานการเรียนรู้เฉพาะ" และด้วยความช่วยเหลือของการฝึกซ้ำ ๆ คุณสามารถปรับปรุงการออกกำลังกายทุกวันในผู้ป่วยที่มีความผิดปกติทางระบบประสาท การบำบัดด้วยหุ่นยนต์ที่คอมเพล็กซ์ Lokomat เป็นไปตามข้อกำหนดข้างต้นและทำให้สามารถทำการบำบัดด้วยหัวรถจักรอย่างเข้มข้นพร้อมข้อเสนอแนะ มุมมองทั่วไปของคอมเพล็กซ์แสดงในรูปที่ 5.

ข้าว. 5
Lokomat ประกอบด้วยตัวกระตุ้นสี่ตัวสำหรับบังคับการเดินและระบบสำหรับการขนถ่ายผู้ป่วยและลู่วิ่ง
ผู้ป่วยในรถเข็นอาจมีไม่มาก
ย้ายแรงงานไปที่ลู่วิ่งและยึดด้วยที่หนีบพิเศษ ไดรฟ์ที่ควบคุมด้วยคอมพิวเตอร์จะซิงโครไนซ์กับความเร็วของลู่วิ่ง พวกเขาให้ขาของผู้ป่วยเป็นวิถีของการเคลื่อนไหวที่เดินใกล้เคียงกับธรรมชาติ
แรงจูงใจที่เพิ่มขึ้นของผู้ป่วยดำเนินการโดยการควบคุมโหลดโดยใช้ biofeedback เมื่อแสดงสถานะปัจจุบันบนจอภาพ (รูปที่ 6)

ข้าว. 6
สำหรับงานศัลยกรรมกระดูก (ผู้ใหญ่และเด็ก), เวชศาสตร์การกีฬา, การฟื้นฟูอุตสาหกรรม, การป้องกันและรักษาโรคข้อเข่าเสื่อม, หุ่นยนต์ของ บริษัท American Biodex เป็นที่รู้จัก หลักการทำงานขึ้นอยู่กับไดนาโมเมทรีอิเล็กทรอนิกส์ ระบบให้การวินิจฉัย การรักษา และเอกสารเกี่ยวกับความผิดปกติที่ก่อให้เกิดความผิดปกติในการทำงานของกล้ามเนื้อและข้อต่ออย่างรวดเร็วและแม่นยำ ระบบนี้ช่วยให้การเคลื่อนข้อต่อไปในทิศทางของการงอ / การยืด การลักพาตัว / การเหนี่ยวนำและการหมุน ซึ่งจำเป็นสำหรับการฟื้นฟูหน้าที่ที่หายไปอย่างสมบูรณ์
ในชุดประกอบด้วยชุดอุปกรณ์เสริมสำหรับการทำงานกับข้อต่อสะโพก เข่า ไหล่ และข้อศอก ตลอดจนข้อเท้าและข้อมือ มุมมองทั่วไปของระบบที่ทำงานด้วยแขนขาบนและล่างจะแสดงในรูปที่ 7.

ข้าว. 7
หุ่นยนต์พักฟื้นแขนขาส่วนบนและส่วนล่างถูกนำเสนอในการประชุมวิชาการด้านวิทยาการหุ่นยนต์ทางการแพทย์ในเพนซิลเวเนีย รูปที่ 8 ทางด้านซ้าย: GENTLE / s manipulator พัฒนาโดย University of Reading สหราชอาณาจักร ศูนย์: ARMguide manipulator พัฒนาโดยสถาบันฟื้นฟูสมรรถภาพแห่งชิคาโก ขวา: เครื่องควบคุม Manipulandum พัฒนาโดยสถาบันฟื้นฟูชิคาโก

มะเดื่อ 8 Manipulators สำหรับการสร้างรยางค์บน
รูปที่ 9 ซ้ายบน: หุ่นยนต์ AutoAmbulator พัฒนาโดย HealthSouth ประเทศสหรัฐอเมริกา บนขวา: เครื่องจำลองการเดิน พัฒนาโดยมหาวิทยาลัยแคลิฟอร์เนีย สหรัฐอเมริกา); ล่างซ้าย: หุ่นยนต์ GaitMaster 2 พัฒนาโดยมหาวิทยาลัย Tsukuba ประเทศญี่ปุ่น); ล่างขวา: หุ่นยนต์สำหรับการเคลื่อนไหวของแขนขา เช่นเดียวกับการนวด พัฒนาโดย Russian Academy of Sciences) อธิบายไว้ในรายละเอียดด้านล่าง

มะเดื่อ 9 หุ่นยนต์สำหรับการฟื้นฟูข้อต่อของรยางค์ล่าง
ผลกระทบด้วยความช่วยเหลือของหุ่นยนต์ที่กล่าวถึงข้างต้นจะเรียกว่าการบำบัดด้วยกลไก Mechanotherapy เป็นวิธีการของการออกกำลังกายกายภาพบำบัดโดยอาศัยการเคลื่อนไหวแบบมิเตอร์ (ส่วนใหญ่สำหรับส่วนแขนขาแต่ละส่วน) ดำเนินการโดยใช้อุปกรณ์พิเศษ การใช้กลไกบำบัดเป็นวิธีการฟื้นฟูสมรรถภาพสำหรับความผิดปกติของการเคลื่อนไหวต่างๆ เมื่อจำเป็นต้องเพิ่มช่วงของการเคลื่อนไหวในข้อต่อและความแข็งแรงของกล้ามเนื้อบางกลุ่ม อุปกรณ์บางอย่างสามารถใช้ได้ทันทีหลังการผ่าตัด ทางเลือกของการเคลื่อนไหวที่ทำกับอุปกรณ์กลไกบำบัดนั้นพิจารณาจากลักษณะของข้อจำกัดของการเคลื่อนไหวและลักษณะทางกายวิภาคของข้อต่อ
หุ่นยนต์จัดการเนื้อเยื่ออ่อน (หุ่นยนต์นวด)
ประวัติการปรากฏตัวของหุ่นยนต์ใน VM สำหรับการนวดมีดังนี้ ในปี 1997 ที่งาน IARP Medical Robotics Forum ครั้งที่สอง มีการนำเสนองานเดียวที่ใช้หุ่นยนต์สำหรับเวชศาสตร์ฟื้นฟู - หุ่นยนต์นวด ในปี 2545 หุ่นยนต์นวดตัว Tickle ซึ่งเป็นแมลงที่จั๊กจี้ ได้ปรากฏตัวบนเว็บไซต์ของบริษัทดัตช์ ในปี 2546 สิทธิบัตรของรัสเซียปรากฏขึ้น - หุ่นยนต์สำหรับการนวดด้วยรถไฟ ในปี 2548 เว็บไซต์แห่งหนึ่งใน Silicon Valley รายงานว่ามีการใช้หุ่นยนต์ Puma ในการนวด หุ่นยนต์ตัวนี้มีพื้นฐานมาจากแนวคิดที่ร่างไว้ในงานของรัสเซีย น่าเสียดายที่การพัฒนานี้ไม่เป็นที่รู้จัก ผลงานที่กล่าวข้างต้นเป็นตัวแทนของหุ่นยนต์นวดที่รู้จักกันส่วนใหญ่ หากไม่นับอุปกรณ์นวดจำนวนมาก
เครื่องมือฮาร์ดแวร์ต่าง ๆ ถูกนำมาใช้เพื่ออำนวยความสะดวกในการทำงานของนักนวดบำบัดมาเป็นเวลานานเพื่อป้องกันโรคจากการทำงานของมือ สิ่งที่ง่ายที่สุด: เครื่องสั่น, ลูกกลิ้ง, การฝังเข็มและการกดจุดเป็นวิธีของการใช้เครื่องจักรที่หมอนวดเคลื่อนไหว (รูปที่ 10)


มะเดื่อ 10. ฮาร์ดแวร์เวชศาสตร์ฟื้นฟู
ควรสังเกตว่าหุ่นยนต์สามารถเป็นพาหะของฮาร์ดแวร์ดังกล่าวได้
ซับซ้อนกว่านั้นคือเครื่องมืออัตโนมัติ เช่น เก้าอี้นวด เก้าอี้นวด (รูปที่ 11) มีเบาะลมปรับแรงดันได้ มีลูกกลิ้งควบคุมแรงกดเป็นตัวกระตุ้น พื้นที่ของผลการนวด: บริเวณปากมดลูก, หลัง, บริเวณเอว, ก้น, ต้นขา, ขา, เท้า ประเภทของการนวด: นวด, ตบ, ตี, สั่นสะเทือน, ชิอัตสึ จากแผงควบคุม คุณสามารถตั้งค่าระดับความเข้มข้นของการนวดที่ต้องการได้

มะเดื่อ 11
อุปกรณ์นวดกึ่งอัตโนมัติซึ่งช่วยบรรเทาการนวดบางส่วนเป็นที่นิยม รูปที่ 12 แสดงมือที่ทำโดยบริษัทอเมริกัน Meilis ซึ่งช่วยในการใช้เทคนิคการหนีบ
มะเดื่อ 12
หุ่นยนต์ของบริษัท Tickle สัญชาติดัทช์นั้นออกแบบได้ง่ายมาก (รูปที่ 13) กล่องโลหะประกอบด้วยมอเตอร์ไฟฟ้า 2 ตัว แบตเตอรี่แบบชาร์จซ้ำได้ และเซ็นเซอร์สี่ตัวที่ช่วยให้คุณตรวจสอบความลาดเอียงของพื้นผิวที่หุ่นยนต์นวดบำบัดกำลังเคลื่อนที่ การเคลื่อนไหวจะดำเนินการโดยใช้ "หนอนผีเสื้อ" ซิลิโคนสองตัวที่ปกคลุมด้วยส่วนที่ยื่นออกมาซึ่งสร้างเอฟเฟกต์การนวด หลักการเคลื่อนที่ของหุ่นยนต์คล้ายกับหลักการเคลื่อนที่ของรถถัง: มอเตอร์แต่ละตัวขับเคลื่อนหนอนผีเสื้อของตัวเอง การกระทำของหุ่นยนต์เป็นการลูบและจั๊กจี้ ทำให้เกิดผลผ่อนคลาย

มะเดื่อ 13
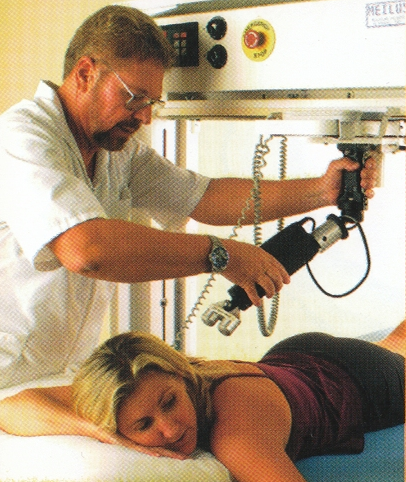
หุ่นยนต์นวดตามทางจะทำการลูบไล้เป็นเส้นตรงต่อเนื่องเป็นแนวราบบนพื้นผิวของร่างกายขนาดใหญ่ (หลัง หน้าอก หน้าท้อง แขนขา) การลูบผิวเผินแบบนี้มีลักษณะเฉพาะโดยการเคลื่อนไหวที่อ่อนโยนและเบาเป็นพิเศษซึ่งมีผลทำให้ระบบประสาทสงบลง ทำให้กล้ามเนื้อผ่อนคลาย และปรับปรุงการไหลเวียนโลหิต การออกแบบหุ่นยนต์เป็นรถเข็นที่มีมอเตอร์ไฟฟ้าเคลื่อนที่ไปตามลำตัวของผู้ป่วย (รูปที่ 14) การสำรวจจะทำโปรไฟล์ตามการบรรเทาพื้นผิวด้านหลังของผู้ป่วยที่ระบุและไม่สามารถตั้งโปรแกรมใหม่ได้ แปรงแบบลากจะถูกห้อยลงมาจากแคร่ตลับหมึกและกดลงบนตัวคนไข้ด้วยแผ่นยางยืด

มะเดื่อ 14
ในปี 2550 หุ่นยนต์สำหรับนวดหน้า WAO-1 (Waseda Asahi Oral Rehabilitation Robot 1) ได้รับการพัฒนาในญี่ปุ่น หุ่นยนต์ (รูปที่ 15) มีแขนกลขนาด 50 ซม. สองตัวที่นวดใบหน้าของผู้ป่วยทั้งสองข้าง มั่นใจในความปลอดภัยด้วยระบบบังคับบังคับที่ดันแขนของหุ่นยนต์ไปด้านข้าง หากออกแรงมากเกินไป
การนวดหน้าได้รับการยอมรับว่าเป็นวิธีที่มีประสิทธิภาพมากในการต่อสู้กับอาการปากแห้ง เนื่องจากช่วยกระตุ้นการหลั่งน้ำลายเพิ่มเติม และยังช่วยแก้ไขความผิดปกติของโครงสร้างช่องปากอีกด้วย

ข้าว. 15
ประสิทธิภาพของอุปกรณ์นวดนั้นพิจารณาจากความเพียงพอของการสัมผัสทางกลกับผู้ป่วย ผู้ติดต่อนี้ทำผ่านเครื่องมือฮาร์ดแวร์ ดังนั้นในเทคนิคที่สร้างมือมนุษย์ เครื่องมือจะต้องเลียนแบบคุณสมบัติการสัมผัสของมือมนุษย์: ความยืดหยุ่น ความอบอุ่น ความชื้น คุณสมบัติเสียดทาน (ความหยาบ ความเรียบเนียน ความลื่น) ความสามารถในการประสานงาน (หลายนิ้ว ความสามารถในการจับ) ในขอบเขตที่มากขึ้น หุ่นยนต์จัดการหลายข้อต่อสามารถจัดเตรียมคุณสมบัติที่แสดงไว้ได้
มหาวิทยาลัยอุตสาหกรรมแห่งรัฐมอสโกได้พัฒนาหุ่นยนต์สำหรับแสดงเทคนิคการนวดและการเคลื่อนไหวของแขนขาในข้อต่อ พื้นฐานของหุ่นยนต์นี้คือหุ่นยนต์อุตสาหกรรม RM-01 ซึ่งเป็นแขนกลที่มีขนาดและจลนศาสตร์ของมนุษย์ (รูปที่ 16) เมื่อสัมผัสกับร่างกาย หุ่นยนต์จะพัฒนาความพยายามได้ถึง 60 นิวตัน ความพยายามที่จำเป็นได้รับการพัฒนาและควบคุมโดยระบบควบคุมแรงตำแหน่งที่ขยายขีดความสามารถของหุ่นยนต์มาตรฐาน

มะเดื่อ 16
หุ่นยนต์หกไดรฟ์ที่มีข้อมูลดังกล่าวสามารถดำเนินการต่างๆ ที่เป็นที่รู้จักได้โดยตรงบนเนื้อเยื่ออ่อน กล่าวคือ การนวดที่หลากหลายรวมถึงการจัดการกับข้อต่อในรูปแบบของการเคลื่อนไหวแบบพาสซีฟและแอคทีฟของแขนขาการผ่อนคลายหลังมีมิติเท่ากันในรูปแบบของการรวมกันของการขนถ่ายกล้ามเนื้อของแขนขา ในรูปที่ 17 หุ่นยนต์กำลังบีบกล้ามเนื้อหลังของหญิงสาว
มะเดื่อ 17
ขาเทียม biofeedback ที่ใช้งานของแขนขาบนและล่าง
Bioprosthetics ของแขนขาบนและล่างซึ่งหายไปจากการบาดเจ็บหรือเจ็บป่วย อาศัยวิธีแก้ปัญหาที่ง่ายกว่า วิธีแก้ปัญหาที่ง่ายที่สุดบางวิธีเพียงคืนค่ารูปลักษณ์ของแขนขาเท่านั้นในขณะที่บางวิธีคืนค่าการทำงานบางอย่าง รูปที่ 18 แสดงการจำแนกประเภทของขาเทียมซึ่งจำแนกประเภทของขาเทียมที่ใช้งานและ biofeedback

มะเดื่อ 18
การพัฒนาบนพื้นฐานของทฤษฎีการทำงานร่วมกันของขีปนาวุธ ขาเทียมส่วนล่างไม่ทำงานและไม่ใช้ biosignals แต่ใช้ความยืดหยุ่นของสปริงของขาเทียมได้อย่างมีประสิทธิภาพ
ในการดึงขาเทียมของรยางค์บนซึ่งเริ่มแรกเป็นแบบพาสซีฟการเคลื่อนไหวของมือนั้นเกิดจากการเคลื่อนไหวเพิ่มเติมของแขนที่เหลือหรือโดยการเคลื่อนไหวของลำตัว ในตอนแรก ลิงค์ส่งสัญญาณนั้นเป็นแท่งที่ยืดหยุ่นได้ ต่อมาก็มีขาเทียมแบบแอกทีฟฉุดปรากฏขึ้น ซึ่งการเคลื่อนไหวของแท่งถูกทำซ้ำโดยมอเตอร์ในตัว
แอคทีฟ แต่ไม่ใช่ biofeedback เป็นอวัยวะเทียม myotonic ซึ่งสัญญาณควบคุมเป็นความพยายามของคนพิการ เซ็นเซอร์ในรูปแบบของไมโครสวิตช์หรือสเตรนเกจวัดแรงเหล่านี้และส่งไปยังแอคทูเอเตอร์ของแปรง
วิธีการพิจารณาของการทำเทียมโดยไม่ใช้ biosignals มีข้อเสียหลายประการ แท่งควบคุมเป็นภาระแก่ผู้ทุพพลภาพ ขัดขวางการเคลื่อนไหวของผ้าคาดไหล่ จำนวนคำสั่งควบคุม เช่นเดียวกับการควบคุม myotonic ถูกจำกัด (หนึ่งหรือสองคำสั่ง) การควบคุมถูกรบกวนโดยการกระแทกจากภายนอกโดยไม่ได้ตั้งใจเข้าไปในเบ้าตาของตอขาเทียม อย่างไรก็ตาม ขาเทียมที่ง่ายที่สุดได้รับการออกแบบให้เป็นโครงสร้างแบบแยกส่วนและผลิตขึ้นเป็นจำนวนมาก
ความสำเร็จในด้านอิเล็กโตรสรีรวิทยา ชีวกลศาสตร์ ไมโครอิเล็กทรอนิกส์ และระบบควบคุมป้อนกลับแบบปรับตัวได้มีส่วนช่วยในการพัฒนาอวัยวะเทียมที่ควบคุมทางชีวภาพ
ในปัจจุบัน บริษัท เยอรมัน "Otto Bock" เป็นที่รู้จักซึ่งผลิตขาเทียมแบบพาสซีฟและแอคทีฟเป็นลำดับ รูปที่ 19 แสดงขาเทียมแบบแอกทีฟ

มะเดื่อ 19
ผลลัพธ์ที่สำคัญที่สุดของ bioprosthetics ในยุค 70 และ 80 ในรัสเซียนั้นเป็นที่รู้จักจากผลงานของ Central Research Institute of PP ในงานของ TsNIIPP ทิศทางใหม่โดยพื้นฐานในแขนขาเทียมได้ถือกำเนิดขึ้น - การสร้างอวัยวะเทียมที่มีระบบควบคุมไฟฟ้าชีวภาพหรืออวัยวะเทียมที่ควบคุมทางชีวภาพ สาระสำคัญของหลักการใหม่ในการสร้างแขนขาเทียมคือการควบคุมแหล่งพลังงานภายนอกเนื่องจากการทำงานของอวัยวะเทียมนั้นโดยทั่วไปแล้วคล้ายกับการประสานงานตามธรรมชาติของการเคลื่อนไหวของบุคคลที่มีสุขภาพดี
ในสิ่งมีชีวิต การควบคุมจะถูกส่งไปยังกล้ามเนื้อผ่านแรงกระตุ้นทางชีวภาพที่สะท้อนถึงคำสั่งของระบบประสาทส่วนกลาง ในทำนองเดียวกัน ในแขนเทียมที่ควบคุมด้วยไฟฟ้าชีวภาพ บทบาทของสัญญาณคำสั่งเล่นโดยกระแสชีวภาพที่เปลี่ยนทิศทางจากกล้ามเนื้อที่ถูกตัดของตอ กลไกที่ดำเนินการตามคำสั่งคือแปรงประดิษฐ์ที่ติดตั้งไดรฟ์ไฟฟ้าขนาดเล็กพร้อมแหล่งจ่ายไฟอัตโนมัติ
จากวัสดุของการประชุมสัมมนาปี 2547 ในรัฐเพนซิลเวเนียเป็นที่ทราบกันดีอยู่แล้วว่ามีอวัยวะเทียมและโครงกระดูกภายนอกที่แสดงไว้ในรูปที่ 20

มะเดื่อ 20 ขาเทียมและโครงกระดูกภายนอกที่เคลื่อนไหว
ผลงานชิ้นแรกๆ ในสาขาอวัยวะเทียมและโครงกระดูกภายนอกที่เคลื่อนไหวอยู่นั้นเป็นผลงานของ Miomir Vukobratovich ภายใต้การนำของเขา โครงกระดูกภายนอกได้รับการพัฒนาในรุ่นหนึ่งเป็นระบบไฟฟ้า ส่วนอีกรุ่นหนึ่งใช้ระบบขับเคลื่อนลมของข้อต่อสะโพก เข่าและข้อเท้าสำหรับขาทั้งสองข้างของผู้ป่วย (รูปที่ 21) โครงกระดูกภายนอกมีจุดมุ่งหมายเพื่อเสริมสร้างกล้ามเนื้อที่อ่อนแออย่าง dystrophically ของรยางค์ล่างของบุคคลขณะเดิน

มะเดื่อ 21
บริษัท Matsushita ของญี่ปุ่นได้พัฒนาชุดหุ่นยนต์ที่จะช่วยฟื้นฟูผู้ที่เป็นอัมพาตบางส่วน (รูปที่ 22) เมื่อคนที่เป็นอัมพาตที่แขนข้างหนึ่งเคลื่อนไหวด้วยแขนที่แข็งแรง แขนที่เป็นอัมพาตจะทำการเคลื่อนไหวแบบเดียวกัน โดยเกร็งและงอเครื่องอัดที่ทำหน้าที่เป็นกล้ามเนื้อ โดยการทำซ้ำการเคลื่อนไหวของแขนที่แข็งแรง คนในชุดหุ่นยนต์สามารถฝึกแขนที่เป็นโรคได้จนกว่าจะมีการฟื้นฟูการทำงานของแขนขาตามปกติ

มะเดื่อ 22
ชุดน้ำหนัก 1.8 กก. ได้รับการพัฒนาร่วมกันโดยบริษัท
ชุดดังกล่าวได้รับการทดสอบที่โรงพยาบาลแล้ว และมีแผนจะทำการผลิตเชิงพาณิชย์ ค่าใช้จ่ายโดยประมาณของชุดสูทสำหรับใช้ในคลินิกฟื้นฟูสมรรถภาพจะอยู่ที่ 17,000 ดอลลาร์สำหรับใช้ในบ้าน - ประมาณ 2,000 ดอลลาร์
บริษัท Cyberdine ซึ่งตั้งอยู่ในกรุงโตเกียวอีกแห่งหนึ่งได้พัฒนาชุด HAL (Hybrid Assistive Limb) (รูปที่ 23) ซึ่งช่วยให้ผู้สูงอายุและผู้ทุพพลภาพเดินได้ อุปกรณ์เซ็นเซอร์จะวางจำหน่ายในญี่ปุ่นโดยให้เช่า $2,200 ต่อเดือน ระบบคอมพิวเตอร์ที่ใช้แบตเตอรี่ขนาด 22 ปอนด์ติดอยู่ที่เอว ขับเคลื่อนด้วยเหล็กจัดฟันที่รัดไว้ที่สะโพกและเข่า และให้ความช่วยเหลือในการเดินแบบอัตโนมัติ

มะเดื่อ 23
ข้อสรุป
1. พิจารณาจากสิ่งพิมพ์ขององค์กรพัฒนาและศูนย์การแพทย์ ด้านการประยุกต์ใช้หุ่นยนต์ทางการแพทย์ รวมถึงเวชศาสตร์ฟื้นฟู กำลังขยายตัวและความต้องการหุ่นยนต์เหล่านี้เพิ่มขึ้น
2. หุ่นยนต์ทางการแพทย์มีข้อดีเหนือฮาร์ดแวร์อื่นๆ หลายประการ สิ่งเหล่านี้เป็นการตั้งโปรแกรมใหม่อย่างรวดเร็ว, การเคลื่อนไหวซ้ำ ๆ ที่มีความแม่นยำสูง, ความไม่ย่อท้อ, การขาดปัจจัยส่วนตัว (มโนธรรม), อินเทอร์เฟซที่เป็นมิตร (การติดต่อทางจิต - อารมณ์), การเป็นหุ้นส่วน (สำหรับเด็ก, การมีส่วนร่วมในเกม, ในการเคลื่อนไหวต่าง ๆ เช่นในการออกกำลังกายตอนเช้า ). นอกจากนี้ การปรับให้เข้ากับลักษณะเฉพาะของบุคคล (การควบคุมตำแหน่ง-แรง) การมีอยู่ของสติปัญญา (การสะสมของประสบการณ์ การวิเคราะห์ การสร้างโปรแกรม) ความปลอดภัยที่เพิ่มขึ้นเนื่องจากการปรับตัวและสติปัญญา
3. เมื่อเทียบกับมือของแพทย์ หุ่นยนต์ทางการแพทย์ในปัจจุบันมักมีความอ่อนไหวและการประสานงานในการเคลื่อนไหวที่ซับซ้อนน้อยกว่า
4. แนวคิดของการพัฒนาและการนำหุ่นยนต์ไปใช้ใน VM สำหรับผู้ที่มีสุขภาพดีประกอบด้วยการใช้หุ่นยนต์อัจฉริยะที่ปรับตัวได้ เพื่อรักษาและเพิ่มปริมาณสำรองด้านสุขภาพของประชากร และเพื่อฟื้นฟูศักยภาพการทำงานของคนงาน
5. ในการพัฒนาและใช้งานหุ่นยนต์ใน VM ควรมีประนีประนอมระหว่างหุ่นยนต์มัลติฟังก์ชั่นและหุ่นยนต์เฉพาะทางราคาประหยัดที่มีไดรฟ์จำนวนน้อย
6. สำหรับฮาร์ดแวร์ VM ที่พัฒนาแล้ว ซึ่งรวมถึงหุ่นยนต์ที่จัดการเนื้อเยื่ออ่อนและข้อต่อ อวัยวะเทียมที่ควบคุมโดยแอกทีฟและควบคุมทางชีวภาพ ข้อมูลการสัมผัสและการวัดแรงจะถูกนำมาใช้อย่างมีประสิทธิภาพ ทั้งสำหรับพลังงานเปิดและปิด และระบบควบคุมกำลังตำแหน่ง
7. ข้อมูลชีวภาพถูกใช้โดยตรงเป็นสัญญาณควบคุม สร้างระบบปิด หรือสร้างการป้อนกลับทางชีววิทยาผ่านการมองเห็นและระบบประสาทของมนุษย์
บรรณานุกรม
วี.เอฟ.โกโลวิน ปัญหาการพัฒนาหุ่นยนต์ในเวชศาสตร์ฟื้นฟู การดำเนินการของการประชุม "เมคคาทรอนิกส์", เซนต์ปีเตอร์สเบิร์ก, 2008
ซาฟราซอฟ จี.วี. วิทยาการหุ่นยนต์ทางการแพทย์: ความทันสมัย ปัญหา และหลักการออกแบบทั่วไป // แถลงการณ์ของ MSTU im. บาวแมน N.E. ฉบับพิเศษ "วิศวกรรมชีวการแพทย์และเทคโนโลยี" การผลิตเครื่องมือ "ชุด 1998
Razumov A.N. , Golovin V.F. การนวดเป็นวัฒนธรรมของชีวิตประจำวันของคนที่มีสุขภาพดี Bulletin of health-improving Medicine, Moscow: 2010, No. 6
Razumov A.N. สุขภาพของคนที่มีสุขภาพดี - ม. "แพทยศาสตร์", 2550
Razumov A.N. , Ponomarenko V.A. , Piskunov V.A. สุขภาพของคนที่มีสุขภาพดี มอสโก: แพทยศาสตร์ 2539
Dubrovsky V.I. , Valeology. วิถีการดำเนินชีวิตที่มีสุขภาพดี. - ม.: Retorika-A, 2001.
Razumov A.N. , Pokrovsky V.I. สุขภาพของคนที่มีสุขภาพพื้นฐานทางวิทยาศาสตร์ของเวชศาสตร์ฟื้นฟู M.: RAMS RNTs VMK, 2007
Zabludovsky V.I. วิทยานิพนธ์ "วัสดุเกี่ยวกับผลกระทบของการนวดต่อคนที่มีสุขภาพดี" - เซนต์ปีเตอร์สเบิร์ก: 2425
โกโลวิน วี.เอฟ. หุ่นยนต์สำหรับนวด การดำเนินการของ JARP 2nd Workshop on Medical Robotics Heidelberg, Germany, 1997
ระบบ Biodex 3. คู่มือ, 20 Ramsay Road, Shirley, New York 11967-4704
Kovrazhkina E.A. , Rumyantseva N.A. , Staritsyn A.N. , Suvorov A.Yu. , Ivanova G.E. , Skvortsova V.I. หุ่นยนต์ฝึกกลในการฟื้นฟูสมรรถภาพการเดินในผู้ป่วยโรคหลอดเลือดสมอง // M.: Rasmirbi, No. 1 (24) 2008, p. 11-16.
เทคโนโลยีอำนวยความสะดวก IARP ดำเนินการประชุมเชิงปฏิบัติการเกี่ยวกับหุ่นยนต์ทางการแพทย์ Hidden Valley, เพนซิลเวเนีย, สหรัฐอเมริกา, พ.ศ. 2547
หุ่นยนต์ฟื้นฟูสมรรถภาพ, การดำเนินการ IARP, การประชุมเชิงปฏิบัติการเกี่ยวกับหุ่นยนต์ทางการแพทย์ Hidden Valley, เพนซิลเวเนีย, สหรัฐอเมริกา, พ.ศ. 2547
Mansurov O.I. , Mansurov I.Ya. วิธีการนวดพื้นผิวด้วยฮาร์ดแวร์และหุ่นยนต์สำหรับการนวดตามรอยที่ใช้วิธีนี้ รส.สิทธิบัตรเลขที่ 2005130736/14 ลงวันที่ 05.10.2005
Jones, Kenny C., Du, Winncy, “Development a Massage Robot for Medical Therapy,” Proceedings of the IEEE / ASME International Conference on Advanced Intelligent Mechatronics (AIM'03), 23-26 กรกฎาคม 2546, โกเบ, ประเทศญี่ปุ่น, หน้า . ... 1096-1101
Golovin V.F. , Grib A.N. ระบบเมคคาทรอนิกส์สำหรับการบำบัดด้วยตนเองและการนวด Proc. การประชุมนานาชาติ Mehatronics Forum ครั้งที่ 8, มหาวิทยาลัย Twente, เนเธอร์แลนด์, 2002
โกโลวิน วี.เอฟ. หุ่นยนต์สำหรับนวดและเคลื่อนย้าย การประชุมเชิงปฏิบัติการของ AMETMAS-NoE, มอสโก, รัสเซีย, 1998
Golovin V.F. , Grib A.N. หุ่นยนต์ช่วยด้วยคอมพิวเตอร์สำหรับการนวดและการเคลื่อนย้าย Proc. “วิทยาการคอมพิวเตอร์และเทคโนโลยีสารสนเทศ”, การประชุม Greek University of Patras, 2002
Golovin V.F. , Samorukov A.E. วิธีการนวดและอุปกรณ์สำหรับการใช้งาน เติบโต. สิทธิบัตรเลขที่ 2145833, 1998
วี.เอฟ.โกโลวิน ระบบเมคคาทรอนิกส์สำหรับการจัดการเนื้อเยื่ออ่อน / เมคคาทรอนิกส์, ระบบอัตโนมัติ, การควบคุม - ม.: 2002 หมายเลข 7
นายพิทกิ้น ชีวกลศาสตร์ของการสร้างขาเทียม -SPb.: สำนักพิมพ์ "Man and health", 2006.-131p
การออกแบบผลิตภัณฑ์เทียมและกระดูก เอ็ด เอ.พี.คูเซคินา M. "อุตสาหกรรมเบาและอาหาร", 1984
Yakobson Ya.S. , Moreinis I. Sh. , Kuzhekin A.P. การออกแบบผลิตภัณฑ์เทียมและกระดูก / เรียบเรียงโดย A.P. คูเชกิ้น. ม.: อุตสาหกรรมเบาและอาหาร, พ.ศ. 2527
Vukobratovich M. กลไกการเดินและมานุษยวิทยา สำนักพิมพ์ "มีร์", ม. 1976
ในช่วงครึ่งหลังของศตวรรษที่ 20 เป็นช่วงเวลาแห่งการพัฒนาอย่างเข้มข้นของวิทยาศาสตร์ เทคโนโลยี อิเล็กทรอนิกส์ และวิทยาการหุ่นยนต์ทุกด้าน ยาได้กลายเป็นหนึ่งในเวกเตอร์หลักสำหรับการแนะนำหุ่นยนต์และปัญญาประดิษฐ์ เป้าหมายหลักของการพัฒนาหุ่นยนต์ทางการแพทย์คือความแม่นยำและคุณภาพการบริการสูง เพิ่มประสิทธิภาพการรักษา และลดความเสี่ยงที่จะเป็นอันตรายต่อสุขภาพของมนุษย์ ดังนั้นในบทความนี้เราจะมาดูวิธีการรักษาแบบใหม่ เช่นเดียวกับการใช้หุ่นยนต์และระบบอัตโนมัติในด้านการแพทย์ต่างๆ
ย้อนกลับไปในช่วงกลางทศวรรษที่ 70 ASM หุ่นยนต์เคลื่อนที่ทางการแพทย์ตัวแรกปรากฏในโรงพยาบาลในเมืองแฟร์แฟกซ์ สหรัฐอเมริกา เวอร์จิเนีย ซึ่งขนส่งตู้คอนเทนเนอร์พร้อมถาดสำหรับป้อนอาหารผู้ป่วย ในปี 1985 โลกได้เห็น PUMA 650 ระบบการผ่าตัดด้วยหุ่นยนต์เป็นครั้งแรก ซึ่งได้รับการออกแบบมาโดยเฉพาะสำหรับศัลยกรรมประสาท ไม่นานนักศัลยแพทย์ได้รับ PROBOT หุ่นยนต์ตัวใหม่และในปี 1992 ระบบ RoboDoc ปรากฏขึ้นซึ่งใช้ในศัลยกรรมกระดูกสำหรับขาเทียม หนึ่งปีต่อมา Computer Motion Inc. เปิดตัวแขนกลอัตโนมัติอีสปสำหรับการถือและปรับตำแหน่งกล้องวิดีโอระหว่างการดำเนินการผ่านกล้อง และในปี 1998 ผู้ผลิตรายเดียวกันได้สร้างระบบ ZEUS ที่ล้ำหน้ายิ่งขึ้น ระบบทั้งสองนี้ไม่ได้เป็นอิสระอย่างสมบูรณ์ หน้าที่ของพวกเขาคือช่วยเหลือแพทย์ในระหว่างการผ่าตัด ในช่วงปลายยุค 90 บริษัทผู้พัฒนา Intuitive Surgical Inc ได้สร้างระบบการผ่าตัดหุ่นยนต์สากลพร้อมรีโมทคอนโทรล - Da Vinci ซึ่งกำลังได้รับการปรับปรุงและนำไปใช้ในหลาย ๆ ศูนย์การแพทย์โลกจนถึงตอนนี้
การจำแนกประเภทหุ่นยนต์ทางการแพทย์:
ปัจจุบัน หุ่นยนต์มีบทบาทอย่างมากในการพัฒนายาแผนปัจจุบัน มีส่วนช่วยในการดำเนินการที่แม่นยำระหว่างการผ่าตัด ช่วยวินิจฉัยและวินิจฉัยได้อย่างถูกต้อง พวกเขาแทนที่แขนขาและอวัยวะที่หายไป ฟื้นฟูและปรับปรุงความสามารถทางกายภาพของบุคคล ลดเวลาในการรักษาตัวในโรงพยาบาล ให้ความสะดวก การตอบสนองและความสบาย และประหยัดค่าใช้จ่ายทางการเงินสำหรับการบริการ
หุ่นยนต์ทางการแพทย์มีหลายประเภทที่แตกต่างกันในด้านการทำงานและการออกแบบ ตลอดจนขอบเขตสำหรับสาขาการแพทย์ต่างๆ:
หุ่นยนต์ศัลยแพทย์และระบบผ่าตัดหุ่นยนต์- ใช้สำหรับการผ่าตัดที่ซับซ้อน พวกเขาไม่ใช่อุปกรณ์อัตโนมัติ แต่เป็นเครื่องมือที่ควบคุมจากระยะไกลที่ให้ความแม่นยำแก่แพทย์ เพิ่มความคล่องแคล่วและควบคุมได้ เพิ่มความแข็งแรงเชิงกล ลดความเหนื่อยล้าของศัลยแพทย์ และลดความเสี่ยงที่ทีมผ่าตัดจะติดเชื้อไวรัสตับอักเสบ เอชไอวี และโรคอื่นๆ
หุ่นยนต์จำลองผู้ป่วย- ออกแบบมาเพื่อฝึกทักษะการตัดสินใจและการแทรกแซงทางการแพทย์ในการรักษาโรค อุปกรณ์ดังกล่าวสามารถทำซ้ำสรีรวิทยาของมนุษย์ได้อย่างสมบูรณ์ จำลองสถานการณ์ทางคลินิก ตอบสนองต่อการบริหารยา วิเคราะห์การกระทำของผู้เข้ารับการฝึกอบรม และตอบสนองต่ออิทธิพลทางคลินิกอย่างเหมาะสม
โครงกระดูกภายนอกและอวัยวะเทียม- โครงกระดูกภายนอกช่วยเพิ่มความแข็งแรงทางกายภาพและช่วยในกระบวนการฟื้นฟูระบบกล้ามเนื้อและกระดูก เทียมหุ่นยนต์ - รากฟันเทียมที่ทดแทนแขนขาที่ขาดหายไป ประกอบด้วยองค์ประกอบทางกลและไฟฟ้า ไมโครคอนโทรลเลอร์ที่มีปัญญาประดิษฐ์ และยังสามารถควบคุมได้จากปลายประสาทของมนุษย์อีกด้วย
หุ่นยนต์ทางการแพทย์และหุ่นยนต์ผู้ช่วย- เป็นทางเลือกแทนความเป็นระเบียบ พยาบาล พยาบาล พยาบาล พี่เลี้ยง และบุคลากรทางการแพทย์อื่นๆ สามารถให้การดูแลเอาใจใส่ผู้ป่วย ช่วยเหลือในการฟื้นฟู สื่อสารอย่างสม่ำเสมอกับแพทย์ที่เข้ารับการรักษา และเคลื่อนย้ายผู้ป่วย
หุ่นยนต์นาโน- microrobots ที่ทำหน้าที่ในร่างกายมนุษย์ในระดับโมเลกุล พัฒนาขึ้นเพื่อการวินิจฉัยและรักษาโรคมะเร็ง การวิจัย หลอดเลือดและฟื้นฟูเซลล์ที่เสียหาย สามารถวิเคราะห์โครงสร้างของ DNA แก้ไข ทำลายแบคทีเรียและไวรัส เป็นต้น
หุ่นยนต์ทางการแพทย์เฉพาะทางอื่นๆ- มีหุ่นยนต์จำนวนมากที่ช่วยในกระบวนการบำบัดของมนุษย์ ตัวอย่างเช่น อุปกรณ์ที่สามารถเคลื่อนย้าย ฆ่าเชื้อ และโรงพยาบาลระบบควอทซ์ได้โดยอัตโนมัติ วัดชีพจร นำเลือดไปวิเคราะห์ ผลิตและจ่ายยา เป็นต้น
ให้เราพิจารณารายละเอียดเพิ่มเติมของหุ่นยนต์แต่ละประเภทโดยใช้ตัวอย่างอุปกรณ์อัตโนมัติที่ทันสมัยซึ่งพัฒนาและใช้งานในด้านการแพทย์หลายด้าน
หุ่นยนต์ศัลยแพทย์และระบบการผ่าตัดด้วยหุ่นยนต์:
ศัลยแพทย์หุ่นยนต์ที่มีชื่อเสียงที่สุดในโลกคือเครื่องมือ Da Vinci อุปกรณ์ที่ผลิตโดย Intuitive Surgical มีน้ำหนักครึ่งตันและประกอบด้วยสองช่วงตึก อันแรกเป็นหน่วยควบคุมสำหรับผู้ปฏิบัติงาน และส่วนที่สองคือเครื่องจักรสี่แขนที่ทำหน้าที่เป็นศัลยแพทย์ หุ่นยนต์ที่มีข้อมือเทียมมีอิสระเจ็ดองศา คล้ายกับมือมนุษย์ และระบบภาพ 3 มิติที่แสดงภาพสามมิติบนจอภาพ การออกแบบนี้จะเพิ่มความแม่นยำในการเคลื่อนไหวของศัลยแพทย์ กำจัดมือสั่น เคลื่อนไหวไม่สะดวก และลดความยาวของแผลและการสูญเสียเลือดระหว่างการผ่าตัด
ศัลยแพทย์หุ่นยนต์ดาวินชี
ด้วยความช่วยเหลือของหุ่นยนต์ ทำให้สามารถดำเนินการต่างๆ ได้มากมาย เช่น การซ่อมแซมลิ้นหัวใจไมตรัล หลอดเลือดหัวใจตีบ การผ่าตัดเนื้อเยื่อหัวใจ การติดตั้งเครื่องกระตุ้นหัวใจสำหรับหัวใจเต้นผิดจังหวะ การผ่าตัดต่อมไทรอยด์ การตัดมดลูกและการตัดมดลูก, กระดูกสันหลัง, การเปลี่ยนแผ่นดิสก์, การผ่าตัดต่อมลูกหมาก - การผ่าตัดเพื่อเอาไธมัส, การตัดกลีบปอด, การผ่าตัดระบบทางเดินปัสสาวะ, การตัดหลอดอาหาร, การผ่าตัดเนื้องอกในช่องท้อง, ต่อมลูกหมากโต, pyeloplasty, การกำจัด กระเพาะปัสสาวะ, ligation และ decoupling ของท่อนำไข่, การตัดไตและการผ่าตัดไต, การปลูกถ่ายท่อไตและอื่น ๆ
ปัจจุบันตลาดหุ่นยนต์ทางการแพทย์และระบบผ่าตัดอัตโนมัติกำลังมีปัญหา นักวิทยาศาสตร์และบริษัทอุปกรณ์การแพทย์ต่างพยายามแนะนำอุปกรณ์ของตน ซึ่งเป็นสาเหตุที่ทำให้อุปกรณ์หุ่นยนต์ปรากฏขึ้นทุกปี
Da Vinci แข่งขันกับศัลยแพทย์หุ่นยนต์ MiroSurge ใหม่สำหรับการผ่าตัดหัวใจ, แขนหุ่นยนต์ของ UPM สำหรับการสอดเข็ม, สายสวนและเครื่องมือผ่าตัดอื่น ๆ อย่างแม่นยำในขั้นตอนการบุกรุกน้อยที่สุด, แพลตฟอร์มการผ่าตัด IGAR ของ CSII, ระบบหุ่นยนต์ - Sensei X catheter ที่ผลิตโดย Hansen Medical Inc สำหรับ การผ่าตัดหัวใจที่ซับซ้อน, ระบบปลูกผม ARTAS จาก Restoration Robotics, ระบบการผ่าตัด Mazor Renaissance ซึ่งช่วยในการผ่าตัดกระดูกสันหลังและสมอง, ศัลยแพทย์หุ่นยนต์จากนักวิทยาศาสตร์จากสถาบัน SSSA Biorobotics รวมถึงผู้ช่วยติดตามหุ่นยนต์สำหรับเครื่องมือผ่าตัดจาก GE การวิจัยระดับโลก อยู่ระหว่างการพัฒนา และอื่นๆ อีกมากมาย ระบบการผ่าตัดด้วยหุ่นยนต์ทำหน้าที่เป็นผู้ช่วยหรือผู้ช่วยแพทย์และไม่ใช่อุปกรณ์อัตโนมัติโดยสมบูรณ์

ศัลยแพทย์หุ่นยนต์ MiroSurge

ศัลยแพทย์หุ่นยนต์ UPM

ศัลยแพทย์หุ่นยนต์ IGAR

หุ่นยนต์สายสวน Sensei X

ระบบปลูกผมด้วยหุ่นยนต์ ARTAS

ศัลยแพทย์หุ่นยนต์ Mazor Renaissance

ศัลยแพทย์หุ่นยนต์จากสถาบัน SSSA Biorobotics

หุ่นยนต์ติดตามเครื่องมือผ่าตัดจาก GE Global Research
หุ่นยนต์จำลองผู้ป่วย:
เพื่อฝึกฝนทักษะการปฏิบัติของแพทย์ในอนาคต มีหุ่นจำลองพิเศษที่สร้างลักษณะการทำงานของระบบหัวใจและหลอดเลือด ระบบทางเดินหายใจ ระบบขับถ่าย และยังตอบสนองต่อการกระทำต่างๆ ของนักเรียนโดยไม่ได้ตั้งใจ เช่น เมื่อให้ยาทางเภสัชวิทยา หุ่นยนต์จำลองผู้ป่วยที่ได้รับความนิยมมากที่สุดคือ HPS (Human Patient Simulator) จากบริษัท METI ของอเมริกา คุณสามารถเชื่อมต่อจอภาพข้างเตียงเข้ากับมันและติดตามความดันโลหิต การเต้นของหัวใจ คลื่นไฟฟ้าหัวใจ และอุณหภูมิของร่างกาย อุปกรณ์ดังกล่าวสามารถใช้ออกซิเจนและปล่อยก๊าซคาร์บอนไดออกไซด์ได้เช่นเดียวกับการหายใจจริง ในโหมดดมยาสลบ ไนตรัสออกไซด์อาจถูกดูดซับหรือปล่อยออกมา ฟังก์ชั่นนี้ให้การพัฒนาทักษะสำหรับการระบายอากาศประดิษฐ์ รูม่านตาในดวงตาของหุ่นยนต์สามารถตอบสนองต่อแสงได้ และเปลือกตาที่ขยับได้จะปิดหรือเปิดขึ้นอยู่กับว่าผู้ป่วยรู้สึกตัวหรือไม่ ในหลอดเลือดแดง carotid, brachial, femoral, radial popliteal ชีพจรจะรู้สึกซึ่งเปลี่ยนแปลงโดยอัตโนมัติและขึ้นอยู่กับความดันโลหิต
เครื่องจำลอง HPS มีโปรไฟล์ผู้ป่วย 30 โปรไฟล์พร้อมข้อมูลทางสรีรวิทยาที่แตกต่างกัน จำลองสามีที่มีสุขภาพดี หญิงตั้งครรภ์ ผู้สูงอายุ ฯลฯ ในกระบวนการฝึกอบรม จะมีการจำลองสถานการณ์ทางคลินิกที่เฉพาะเจาะจง ซึ่งอธิบายตำแหน่งและสภาพของผู้ป่วย เป้าหมาย อุปกรณ์ที่จำเป็น และยารักษาโรค หุ่นยนต์มีคลังยา 50 ตัว ซึ่งรวมถึงยาชาและยาทางหลอดเลือดดำ หุ่นจำลองถูกควบคุมโดยคอมพิวเตอร์ไร้สาย ทำให้ผู้สอนสามารถควบคุมกระบวนการเรียนรู้ทุกด้านได้โดยตรงจากนักเรียน
ควรสังเกตความนิยมอย่างมากของหุ่นจำลองการคลอดบุตรเช่น GD / F55 ออกแบบมาเพื่อฝึกอบรมบุคลากรทางการแพทย์ในแผนกสูติศาสตร์และนรีเวชวิทยา ช่วยให้คุณสามารถฝึกทักษะการปฏิบัติในนรีเวชวิทยา สูติศาสตร์ ทารกแรกเกิด กุมารเวชศาสตร์ ผู้ป่วยหนักและ การพยาบาลในแผนกสูติกรรม หุ่นยนต์ Simroid จำลองผู้ป่วยในเก้าอี้ของทันตแพทย์ ช่องปากเหมือนกับมนุษย์ทุกประการ อุปกรณ์นี้สามารถจำลองเสียงและเสียงครางที่บุคคลสร้างขึ้นได้หากเขาเจ็บปวด มีหุ่นยนต์จำลองสำหรับสอนเทคนิคการยักย้ายถ่ายเท อันที่จริงนี่เป็นหุ่นจำลองของบุคคลที่เลียนแบบเส้นเลือดและภาชนะซึ่งทำจากท่อยางยืด บนอุปกรณ์ดังกล่าว นักเรียนจะฝึกทักษะของการเจาะเลือด การสวน และการเจาะเลือดด้วยเส้นเลือด
โครงกระดูกภายนอกและอวัยวะเทียม:
หนึ่งในอุปกรณ์ทางการแพทย์ที่มีชื่อเสียงที่สุดคือชุดโครงกระดูกภายนอกแบบหุ่นยนต์ ช่วยให้คนพิการเคลื่อนไหวร่างกายได้ ในขณะที่บุคคลพยายามขยับแขนหรือขา เซ็นเซอร์พิเศษบนผิวหนังจะอ่านการเปลี่ยนแปลงเล็กน้อยในสัญญาณไฟฟ้าของร่างกาย ทำให้องค์ประกอบทางกลของโครงกระดูกภายนอกเข้าสู่สภาวะการทำงาน อุปกรณ์ยอดนิยมบางตัว ได้แก่ อุปกรณ์ช่วยเดินของ Honda บริษัท ญี่ปุ่น, โครงกระดูกภายนอกของการฟื้นฟูสมรรถภาพ HAL จาก บริษัท Cyberdyne ซึ่งใช้กันอย่างแพร่หลายในโรงพยาบาลญี่ปุ่น, อุปกรณ์ Parker Hannifin ของ Vanderbilt University ซึ่งทำให้สามารถเคลื่อนย้ายข้อต่อของ สะโพกและหัวเข่า, โครงกระดูกภายนอกอันทรงพลัง NASA X1, ออกแบบมาสำหรับนักบินอวกาศและคนเป็นอัมพาต, โครงกระดูกภายนอก Kickstart จาก Cadence Biomedical ซึ่งไม่ทำงานจากแบตเตอรี่ แต่ใช้พลังงานจลน์ที่มนุษย์สร้างขึ้นเมื่อเดิน, โครงกระดูกภายนอก eLEGS, Esko Rex, HULC จาก Ekso Bionics, ReWalk จาก ARGO, Mindwalker จาก Space Applications Services ซึ่งช่วยให้ผู้เป็นอัมพาต รวมถึงส่วนต่อประสานระหว่างสมองกับเครื่องจักร (BMI) ที่ไม่เหมือนใครหรือเพียงแค่โครงกระดูกภายนอกสำหรับสมอง MAHI-EXO II เพื่อฟื้นฟูการทำงานของมอเตอร์โดยการอ่านคลื่นสมอง
การใช้โครงกระดูกภายนอกอย่างแพร่หลายช่วยให้ผู้คนจำนวนมากทั่วโลกรู้สึกเติมเต็ม ทุกวันนี้แม้แต่คนเป็นอัมพาตก็ยังเดินได้ ตัวอย่างที่ชัดเจนคือขาหุ่นยนต์ของนักฟิสิกส์ Amit Goffer ซึ่งควบคุมด้วยไม้ค้ำยันพิเศษและสามารถกำหนดได้โดยอัตโนมัติว่าเมื่อใดควรก้าว จดจำสัญญาณคำพูด "ไปข้างหน้า" "นั่ง" "ยืน"

ระบบช่วยเดินโครงกระดูกภายนอก

โครงกระดูกภายนอก HAL โดย Cyberdyne

โครงกระดูกภายนอก Parker Hannifin

โครงกระดูกภายนอก NASA X1

Cadence Biomedical Kickstart โครงกระดูกภายนอก

โครงกระดูกภายนอก HULC โดย Ekso Bionics

Exoskeleton ReWalk โดย ARGO

Mindwalker Exoskeleton โดย Space Applications Services 
โครงกระดูกภายนอกสำหรับสมอง MAHI-EXO II

โครงกระดูกภายนอก โดย Amit Goffer
แต่จะทำอย่างไรเมื่อแขนขาขาด? สิ่งนี้ใช้กับทหารผ่านศึกเป็นหลักรวมถึงผู้ที่ตกเป็นเหยื่อของสถานการณ์โดยไม่ได้ตั้งใจ ในเรื่องนี้ บริษัทต่างๆ เช่น Quantum International Corp (QUAN) และ exoprostheses และ Defense Advanced Research Projects Agency (DARPA) ร่วมกับ Department of Veterans' Assistance, the Rehabilitation Center และ US Development Service กำลังลงทุนอย่างหนักใน การวิจัยและพัฒนาหุ่นยนต์เทียม (มือหรือเท้าไบโอนิค) ที่มีปัญญาประดิษฐ์ที่สามารถรับรู้สภาพแวดล้อมและรับรู้ถึงเจตนาของผู้ใช้ อุปกรณ์เหล่านี้เลียนแบบพฤติกรรมของแขนขาตามธรรมชาติอย่างแม่นยำ และยังถูกควบคุมโดยสมองของมันเอง (ไมโครอิเล็กโทรดที่ฝังอยู่ในสมองหรือเซ็นเซอร์ อ่านสัญญาณประสาทและส่งสัญญาณเหล่านี้เป็นสัญญาณไฟฟ้าไปยังไมโครคอนโทรลเลอร์) เจ้าของแขนไบโอนิคที่ได้รับความนิยมมากที่สุดซึ่งมีมูลค่า 15,000 ดอลลาร์คือชาวอังกฤษ Nigel Ekland ผู้เดินทางไปทั่วโลกและส่งเสริมการใช้หุ่นยนต์เทียม
การพัฒนาทางวิทยาศาสตร์ที่สำคัญอย่างหนึ่งคือข้อเท้าหุ่นยนต์ประดิษฐ์ iWalk BiOM ซึ่งพัฒนาโดยศาสตราจารย์ฮิวจ์ เฮอร์ ของ MIT และทีมชีวกลศาสตร์ของเขาที่ MIT Media Lab iWalk ได้รับเงินทุนจากกระทรวงกิจการทหารผ่านศึกของสหรัฐฯ และกระทรวงกลาโหม ด้วยเหตุนี้ ทหารผ่านศึกพิการจำนวนมากที่ประจำการในอิรักและอัฟกานิสถานจึงได้รับข้อเท้าไบโอนิคแล้ว

ข้อเท้าหุ่นยนต์ IWalk BiOM
นักวิทยาศาสตร์จากทั่วทุกมุมโลกไม่เพียงแต่พยายามปรับปรุงคุณสมบัติการทำงานของแขนเทียมหุ่นยนต์เท่านั้น แต่ยังทำให้พวกมันดูสมจริงอีกด้วย นักวิจัยชาวอเมริกันที่นำโดย Zhenan Bao จากมหาวิทยาลัยสแตนฟอร์ดในแคลิฟอร์เนีย ได้สร้างนาโนสกินสำหรับอุปกรณ์เทียมทางการแพทย์ วัสดุโพลีเมอร์นี้มีความยืดหยุ่น ความแข็งแรง การนำไฟฟ้า และความไวต่อแรงกดสูง (สัญญาณที่ตรวจจับได้ เช่น แผงสัมผัส)

Nanoskin จากมหาวิทยาลัยสแตนฟอร์ด
หุ่นยนต์ทางการแพทย์และหุ่นยนต์ผู้ช่วย:
โรงพยาบาลแห่งอนาคตเป็นโรงพยาบาลที่มีบุคลากรน้อยที่สุด ทุกๆ วัน จะมีการแนะนำหุ่นยนต์พยาบาล พยาบาลหุ่นยนต์ และหุ่นยนต์ telepresence ในสถาบันทางการแพทย์มากขึ้นเรื่อยๆ เพื่อติดต่อกับแพทย์ที่เข้ารับการรักษา ตัวอย่างเช่น หุ่นยนต์พยาบาลจาก Panasonic, หุ่นยนต์ช่วยหุ่นยนต์ Human Support Robot (HSR) จาก Toyota, หุ่นยนต์พยาบาลไอริช RP7 จากผู้พัฒนา InTouch Health, หุ่นยนต์เกาหลี KIRO-M5 และอื่นๆ อีกมากมายทำงานในญี่ปุ่นมานานแล้ว อุปกรณ์ดังกล่าวเป็นแท่นบนล้อและสามารถวัดชีพจร อุณหภูมิ ควบคุมเวลารับประทานอาหารและรับประทานยา แจ้งสถานการณ์ปัญหาและการดำเนินการที่จำเป็นโดยทันที ติดต่อเจ้าหน้าที่ทางการแพทย์ที่มีชีวิต เก็บสิ่งของที่กระจัดกระจายหรือตก ฯลฯ .

หุ่นยนต์พยาบาลพานาโซนิค

หุ่นยนต์ผู้ช่วยโตโยต้า HSR

หุ่นยนต์พยาบาล InTouch Health RP7

KIRO-M5 หุ่นยนต์พยาบาล
บ่อยครั้งในการดูแลอย่างต่อเนื่อง แพทย์ไม่สามารถให้ความสนใจผู้ป่วยได้เพียงพอ โดยเฉพาะอย่างยิ่งหากพวกเขาอยู่ห่างจากกันมาก นักพัฒนาเทคโนโลยีทางการแพทย์ที่ใช้หุ่นยนต์ได้ทดลองและสร้างหุ่นยนต์ทางไกล (เช่น LifeBot 5 หรือ RP-VITA จาก iRobot และ InTouch Health) ระบบอัตโนมัติช่วยให้ส่งสัญญาณเสียงและวิดีโอผ่าน 4G, 3G, LTE, WiMAX, Wi-Fi, การสื่อสารผ่านดาวเทียมหรือวิทยุ วัดอัตราการเต้นของหัวใจ ความดันโลหิต และอุณหภูมิร่างกายของผู้ป่วย อุปกรณ์บางอย่างสามารถตรวจคลื่นไฟฟ้าหัวใจและอัลตราซาวนด์ มีหูฟังแบบอิเล็กทรอนิกส์และ otoscope และเคลื่อนที่ไปตามทางเดินในโรงพยาบาลและหอผู้ป่วย หลีกเลี่ยงสิ่งกีดขวาง ผู้ช่วยทางการแพทย์เหล่านี้ให้การดูแลและประมวลผลข้อมูลทางคลินิกอย่างทันท่วงทีแบบเรียลไทม์

หุ่นยนต์ถ่ายทอดสดทางไกล LifeBot 5

หุ่นยนต์ telepresence RP-VITA
มีการใช้หุ่นยนต์ Courier อย่างประสบความสำเร็จในการขนส่งตัวอย่าง ยา อุปกรณ์และวัสดุสิ้นเปลืองในโรงพยาบาล ห้องปฏิบัติการ และร้านขายยาอย่างปลอดภัย ผู้ช่วยมีระบบนำทางที่ทันสมัยและเซ็นเซอร์ออนบอร์ดที่ทำให้ง่ายต่อการเคลื่อนย้ายในห้องที่มีรูปแบบที่ซับซ้อน ตัวแทนที่สดใสของอุปกรณ์ดังกล่าว ได้แก่ American RoboCouriers จาก Adept Technology และ Aethon จาก University of Maryland Medical Center, Japanese Hospi-R จาก Panasonic และ Terapio จาก Adtex

หุ่นยนต์ส่งของ RoboCouriers จาก Adept Technology

หุ่นยนต์ส่งของ Aethon

Panasonic Hospi-R Courier Robot

หุ่นยนต์ส่งของ Terapio จาก Adtex
ทิศทางที่แยกจากกันในการพัฒนาเทคโนโลยีทางการแพทย์ด้วยหุ่นยนต์คือการสร้างรถเข็นแบบดัดแปลง เตียงอัตโนมัติ และยานพาหนะพิเศษสำหรับผู้พิการ พิจารณาการพัฒนาต่างๆ เช่น เก้าอี้แทรคยาง Unimo จากบริษัท Nano-Optonics ของญี่ปุ่น (Chiba Institute of Technology) นำโดยรองศาสตราจารย์ Shuro Nakajima ซึ่งใช้ขาล้อเพื่อปีนบันไดหรือคูน้ำ Tek Robotic Mobilization Device จาก Action Trackchair พานาโซนิคพร้อมแก้ปัญหาการเคลื่อนย้ายผู้ป่วยจากเก้าอี้ขึ้นเตียงที่ต้องการขนาดใหญ่ ความพยายามทางกายภาพบุคลากรทางการแพทย์ อุปกรณ์นี้แปลงจากเตียงเป็นเก้าอี้อย่างอิสระและในทางกลับกันเมื่อจำเป็น Murata Manufacturing Co ได้ร่วมมือกับ Kowa เพื่อสร้างนวัตกรรมยานยนต์ไฟฟ้าสำหรับรถช่วยเดินไฟฟ้า จักรยานแบบมีถังน้ำมันในตัวพร้อมระบบควบคุมลูกตุ้มและไจโรสโคป การพัฒนานี้มีไว้สำหรับผู้สูงอายุและผู้ที่มีปัญหาในการเดินเป็นหลัก นอกจากนี้เรายังสังเกตเห็นหุ่นยนต์ญี่ปุ่นชุดหนึ่ง RoboHelper จาก Muscle Actuator Motor Company ซึ่งเป็นผู้ช่วยที่จำเป็นสำหรับพยาบาลในการดูแลผู้ป่วยที่ติดเตียง อุปกรณ์ดังกล่าวสามารถยกคนขึ้นจากเตียงในท่านั่งหรือเก็บขยะทางกายภาพของคนโกหกได้ ยกเว้นการใช้หม้อและเป็ด
นาโนโรบอท:
นาโนโรบ็อตหรือนาโนบ็อตคือหุ่นยนต์ที่มีขนาดเท่ากับโมเลกุล (น้อยกว่า 10 นาโนเมตร) ที่สามารถเคลื่อนที่ อ่านและประมวลผลข้อมูลได้ เช่นเดียวกับการเขียนโปรแกรมและการทำงานบางอย่าง นี่เป็นทิศทางใหม่อย่างสมบูรณ์ในการพัฒนาหุ่นยนต์ ขอบเขตของการใช้อุปกรณ์ดังกล่าว: การวินิจฉัยมะเร็งในระยะเริ่มต้นและการส่งมอบยาเป้าหมายไปยังเซลล์มะเร็ง, เครื่องมือทางการแพทย์, การผ่าตัด, เภสัชจลนศาสตร์, การเฝ้าติดตามผู้ป่วยโรคเบาหวาน, การผลิตอุปกรณ์จากโมเลกุลแต่ละโมเลกุลโดยการประกอบโมเลกุลโดยนาโนบอทตามแบบแผน, ทหาร ใช้เป็นเครื่องมือในการสอดส่องและจารกรรม และยังเป็นอาวุธ การวิจัยและพัฒนาอวกาศ เป็นต้น
ในขณะนี้ เป็นที่ทราบกันดีอยู่แล้วว่าการพัฒนาหุ่นยนต์ขนาดเล็กทางการแพทย์สำหรับการตรวจหาและรักษาโรคมะเร็งจากนักวิทยาศาสตร์ชาวเกาหลีใต้ หุ่นยนต์ชีวภาพจากนักวิทยาศาสตร์จากมหาวิทยาลัยอิลลินอยส์ที่สามารถเคลื่อนที่ในของเหลวหนืดและสื่อชีวภาพได้ด้วยตัวเองต้นแบบของทะเล แลมป์เพรย์ คือ Cyberplasm nanorobot ซึ่งจะเคลื่อนที่ในร่างกายมนุษย์ การตรวจหาโรคในระยะแรก หุ่นยนต์นาโนของวิศวกร Ado Pun ซึ่งสามารถเดินทางผ่านระบบไหลเวียนโลหิต ส่งยา ทำการทดสอบและขจัดลิ่มเลือด หุ่นยนต์นาโนบ็อตสเปิร์มคือ การพัฒนานักวิทยาศาสตร์ Oliver Schmidt และคณะจาก Institute for Integrative Nanosciences ในเมืองเดรสเดน (ประเทศเยอรมนี) เพื่อจัดหาอสุจิและยา นาโนบอท เพื่อทดแทนโปรตีนในร่างกายจากนักวิทยาศาสตร์จากมหาวิทยาลัยเวียนนา (University of Vienna) ร่วมกับนักวิจัยจาก มหาวิทยาลัยทรัพยากรธรรมชาติและวิทยาศาสตร์เพื่อชีวิตเวียนนา (มหาวิทยาลัยทรัพยากรธรรมชาติและวิทยาศาสตร์เพื่อชีวิตเวียนนา)


หุ่นยนต์ไมโครพลาสซึม

Nanorobots Ado Pune

สเปิร์มบ็อตแม่เหล็กนาโน

นาโนบอททดแทนโปรตีน
หุ่นยนต์ทางการแพทย์เฉพาะทางอื่นๆ:
มีหุ่นยนต์เฉพาะทางจำนวนมากที่ทำงานแยกจากกัน โดยที่เป็นไปไม่ได้ที่จะจินตนาการถึงการรักษาที่มีประสิทธิภาพและมีคุณภาพสูง อุปกรณ์เหล่านี้บางส่วน ได้แก่ หุ่นยนต์ควอตซ์ Xenex และหุ่นยนต์ฆ่าเชื้อ TRU-D SmartUVC จาก Philips Healthcare ไม่ต้องสงสัยเลยว่าอุปกรณ์ดังกล่าวเป็นเพียงผู้ช่วยที่ไม่สามารถถูกแทนที่ได้ในการต่อสู้กับการติดเชื้อในโรงพยาบาลและไวรัส ซึ่งเป็นหนึ่งในปัญหาที่ร้ายแรงที่สุดในสถาบันทางการแพทย์

Xenex หุ่นยนต์ควอตซ์อุปกรณ์

Philips Healthcare TRU-D SmartUVC หุ่นยนต์ฆ่าเชื้อ
การรวบรวมการตรวจเลือดเป็นขั้นตอนทางการแพทย์ที่พบบ่อยที่สุด คุณภาพของขั้นตอนขึ้นอยู่กับคุณสมบัติและสภาพร่างกายของผู้ปฏิบัติงานทางการแพทย์ บ่อยครั้ง ความพยายามที่จะเจาะเลือดในครั้งแรกจบลงด้วยความล้มเหลว ดังนั้น เพื่อแก้ปัญหานี้ หุ่นยนต์ Veebot จึงได้รับการพัฒนา ซึ่งมีคอมพิวเตอร์วิทัศน์ ซึ่งจะกำหนดตำแหน่งของหลอดเลือดดำและนำเข็มไปที่นั่นอย่างระมัดระวัง

หุ่นยนต์เก็บเลือด Veebot
หุ่นยนต์อาเจียนอาเจียนจะตรวจสอบ noroviruses ที่ก่อให้เกิดโรค 21 ล้านโรค รวมถึงอาการคลื่นไส้ ท้องร่วงเป็นน้ำ ปวดท้อง สูญเสียรสชาติ ความเฉื่อยทั่วไป อ่อนแรง ปวดกล้ามเนื้อ ปวดศีรษะ ไอ มีไข้ต่ำ และแน่นอน อาเจียนรุนแรง

หุ่นยนต์ศึกษากระบวนการอาเจียน แลร์รี่อาเจียน
หุ่นยนต์ที่ได้รับความนิยมมากที่สุดสำหรับเด็กยังคงเป็น PARO - ของเล่นเด็กขนปุยที่มีรูปร่างเหมือนพิณพิณ หุ่นยนต์บำบัดสามารถขยับศีรษะและอุ้งเท้า จดจำเสียง น้ำเสียง สัมผัส และวัดอุณหภูมิและแสงในห้องได้ คู่แข่งคือ HugBot หุ่นยนต์ตุ๊กตาหมีตัวใหญ่ที่วัดอัตราการเต้นของหัวใจและความดันโลหิต

หุ่นยนต์บำบัด PARO

Robot Bear HugBot
แยกสาขายาที่เกี่ยวกับการวินิจฉัย การรักษาโรค การบาดเจ็บและความผิดปกติในสัตว์เป็นสัตวแพทยศาสตร์ เพื่อฝึกอบรมผู้เชี่ยวชาญที่มีทักษะในด้านนี้ วิทยาลัยสัตวแพทยศาสตร์ในการพัฒนาสัตว์เลี้ยงหุ่นยนต์จึงสร้างหุ่นยนต์จำลองที่เป็นเอกลักษณ์ในรูปแบบของสุนัขและแมว เพื่อให้ประมาณแบบจำลองพฤติกรรมสัตว์ได้อย่างแม่นยำ ซอฟต์แวร์ได้รับการพัฒนาแยกต่างหากที่ศูนย์ระบบคอมพิวเตอร์ขั้นสูงที่มหาวิทยาลัยคอร์เนลล์ (CAS)

หุ่นจำลองสุนัขและแมว
ประสิทธิภาพของหุ่นยนต์ในการแพทย์:
เห็นได้ชัดว่าการใช้หุ่นยนต์ในการแพทย์มีข้อดีหลายประการเหนือการรักษาแบบเดิมๆ ที่เกี่ยวข้องกับปัจจัยมนุษย์ การใช้มือกลในการผ่าตัดช่วยป้องกันภาวะแทรกซ้อนและข้อผิดพลาดต่างๆ ระหว่างการผ่าตัด ลดระยะเวลาพักฟื้นหลังผ่าตัด ลดความเสี่ยงของการติดเชื้อและการติดเชื้อของผู้ป่วยและเจ้าหน้าที่ ขจัดการสูญเสียเลือดจำนวนมาก ลดความเจ็บปวด และช่วยให้ความงามดีขึ้น ( รอยแผลเป็นเล็กๆ) หุ่นยนต์ผู้ช่วยทางการแพทย์และหุ่นยนต์เพื่อการฟื้นฟูช่วยให้คุณให้ความสนใจผู้ป่วยอย่างใกล้ชิดระหว่างการรักษา ตรวจสอบกระบวนการกู้คืน จำกัดพนักงานที่มีชีวิตอยู่จากการทำงานที่ลำบากและไม่น่าพอใจ และช่วยให้ผู้ป่วยรู้สึกเหมือนเป็นคนที่เต็มเปี่ยม นวัตกรรมการรักษาและอุปกรณ์ทำให้เราใกล้ชิดกับสุขภาพที่ดีขึ้น ปลอดภัยขึ้น และมีชีวิตที่ยืนยาวขึ้นทุกวัน
ทุกๆ ปี ตลาดหุ่นยนต์ทางการแพทย์ทั่วโลกจะเต็มไปด้วยอุปกรณ์ใหม่ๆ และเติบโตขึ้นอย่างไม่ต้องสงสัย ตามการวิจัยของบริษัทวิจัยและการตลาด ตลาดสำหรับหุ่นยนต์ฟื้นฟู อวัยวะเทียม และโครงกระดูกภายนอกเพียงอย่างเดียวจะเติบโตเป็น 1.8 พันล้านดอลลาร์ในปี 2563 หุ่นยนต์ทางการแพทย์จะเฟื่องฟูครั้งใหญ่หลังจากนำมาตรฐาน ISO 13482 มาใช้ ซึ่งจะกลายเป็นชุดกฎเกณฑ์สำหรับองค์ประกอบโครงสร้าง วัสดุ และซอฟต์แวร์ที่ใช้ในอุปกรณ์
บทสรุป:
เราสามารถพูดได้ว่าหุ่นยนต์ทางการแพทย์คืออนาคตของยาอย่างไม่ต้องสงสัย การใช้ระบบอัตโนมัติช่วยลดข้อผิดพลาดทางการแพทย์ได้อย่างมาก ลดการขาดแคลนบุคลากรทางการแพทย์ นาโนโรโบติกส์ช่วยในการเอาชนะโรคร้ายแรงและป้องกันภาวะแทรกซ้อนในระยะเริ่มต้น เพื่อใช้นาโนยาที่มีประสิทธิภาพอย่างกว้างขวาง ภายใน 10-15 ปีข้างหน้า การแพทย์จะก้าวไปอีกขั้นด้วยบริการหุ่นยนต์ น่าเสียดายที่ยูเครนอยู่ในสถานะที่น่าเสียดายสำหรับภาคการพัฒนานี้ ตัวอย่างเช่น ในเมือง Yekaterinburg ประเทศรัสเซีย ศัลยแพทย์หุ่นยนต์ Da Vinci ที่มีชื่อเสียงได้ทำการผ่าตัดครั้งแรกในปี 2007 และในปี 2555 ประธานาธิบดี Dmitry Anatolyevich Medvedev ได้สั่งให้กระทรวงสาธารณสุขของรัสเซียร่วมกับกระทรวงอุตสาหกรรมและการค้าดำเนินการแก้ไขปัญหาของการพัฒนาเทคโนโลยีทางการแพทย์ใหม่โดยใช้หุ่นยนต์ ความคิดริเริ่มนี้ได้รับการสนับสนุนโดย สถาบันการศึกษาของรัสเซียวิทยาศาสตร์ ความจริงก็คือหากไม่มีการสนับสนุนที่แท้จริงจากทางการยูเครนในการพัฒนาด้านวิทยาการหุ่นยนต์ทางการแพทย์ รัฐของเราล้าหลังประเทศอารยะอื่น ๆ ทุกปี ดังนั้นจึงเป็นไปตามตัวบ่งชี้ระดับการพัฒนาของประเทศโดยรวม เพราะการดูแลสุขภาพและชีวิตของพลเมืองที่กล่าวถึงในกฎหมายหลัก - รัฐธรรมนูญของประเทศยูเครนคือ "คุณค่าทางสังคมสูงสุด"
กระแสหลัก
โอ.วี. เชอร์เชนโก้
นักวิจัย FGBNU "ผู้อำนวยการโครงการวิทยาศาสตร์และเทคนิค" มอสโก รัสเซีย [ป้องกันอีเมล]
ส.อ. เชปตูนอฟ
แพทยศาสตรดุษฎีบัณฑิต ผู้อำนวยการ ICTI RAS กรุงมอสโก รัสเซีย [ป้องกันอีเมล]
การผ่าตัดโดยใช้หุ่นยนต์ช่วยและหุ่นยนต์โครงกระดูกเพื่อการฟื้นฟูสมรรถภาพผู้ที่มีความผิดปกติของกล้ามเนื้อและมอเตอร์: ผู้นำด้านเทคโนโลยีระดับโลกและแนวโน้มของรัสเซีย
Cherchenko O.V. , Sheptunov S.A. การผ่าตัดโดยใช้หุ่นยนต์ช่วยและโครงกระดูกภายนอกของหุ่นยนต์สำหรับการฟื้นฟูสมรรถภาพผู้ที่มีความผิดปกติของระบบกล้ามเนื้อและกระดูก: ผู้นำทางเทคโนโลยีระดับโลกและแนวโน้มของรัสเซีย (FGBNU "Directorate of NTP", มอสโก, รัสเซีย; IKTI RAS, มอสโก, รัสเซีย)
คำอธิบายประกอบ ผลการวิเคราะห์การตีพิมพ์และกิจกรรมสิทธิบัตรในสองพื้นที่ที่มีการพัฒนาอย่างแข็งขันที่สุดของอุตสาหกรรมหุ่นยนต์ทางการแพทย์ถูกนำเสนอ: โครงกระดูกภายนอกของหุ่นยนต์สำหรับการฟื้นฟูสมรรถภาพผู้ที่มีความผิดปกติของระบบกล้ามเนื้อและกระดูก การผ่าตัดด้วยหุ่นยนต์ช่วย ความแตกต่างระหว่างโครงสร้างของสิ่งพิมพ์ระดับโลกและระดับชาติและกระแสสิทธิบัตรถูกเปิดเผย ข้อเสียของการพัฒนาจากต่างประเทศในการผ่าตัดด้วยหุ่นยนต์ซึ่งสร้างเงื่อนไขเบื้องต้นสำหรับการส่งเสริมการพัฒนาทดแทนการนำเข้าของวิศวกรในประเทศ
คีย์เวิร์ด: การผ่าตัดโดยใช้หุ่นยนต์ช่วย, โครงกระดูกภายนอกสำหรับการฟื้นฟูผู้ที่มีความผิดปกติของระบบกล้ามเนื้อและกระดูก, ผู้นำด้านเทคโนโลยี, ความสามารถในการแข่งขัน, การวิเคราะห์ไซเอนโทเมตริก, การวิเคราะห์สิทธิบัตร
© O.V. เชอร์เชนโก
ส.อ. Sheptunov, 2015
หุ่นยนต์ทางการแพทย์สามารถกำหนดให้เป็นอุปกรณ์กลไกอิเล็กทรอนิกส์ที่ทำหน้าที่บางส่วนหรือทั้งหมดของบุคคลหรืออวัยวะและระบบส่วนบุคคลของบุคคลในการแก้ปัญหาทางการแพทย์ต่างๆ ย้อนกลับไปในปี 1998 โจเซฟ เอ็นเดลเบอร์เกอร์ วิศวกรและผู้ประกอบการชาวอเมริกัน ผู้ก่อตั้งบริษัทเอกชนแห่งแรกของโลกสำหรับการผลิตออโตมาตะที่ตั้งโปรแกรมได้ และได้รับฉายาว่า "บิดาแห่งวิทยาการหุ่นยนต์" สำหรับเรื่องนี้ โดยได้แนะนำหุ่นยนต์ผู้ช่วย HelpMate Trackless Robotic Courier กล่าวว่าโรงพยาบาล เป็นสภาพแวดล้อมที่สมบูรณ์แบบสำหรับหุ่นยนต์
หุ่นยนต์มักจะสามารถสร้างมูลค่าเพิ่มใหม่ในการดูแลสุขภาพโดย:
1. ลดต้นทุนแรงงานโดยการดำเนินการบางอย่างไม่ใช่โดยบุคคล แต่ด้วยวิธีการทางหุ่นยนต์
2. ผลประโยชน์ทางสังคมและเศรษฐกิจโดยเพิ่มความเป็นอิสระและกิจกรรมทางสังคมของผู้ที่ต้องการการดูแลเฉพาะทาง
3. การเพิ่มคุณภาพการดูแลโดยระบบหุ่นยนต์ (หุ่นยนต์สามารถทำการปรับเปลี่ยนที่ละเอียดอ่อนมากขึ้นและดำเนินการซ้ำๆ ด้วยระดับความแม่นยำที่มากกว่ามนุษย์)
4.การดำเนินการที่บุคคลไม่สามารถดำเนินการได้ รวมทั้งการผ่าตัด เนื่องจากข้อจำกัดด้านขนาดหรือไม่
กระแสหลัก
2012 2013 2014 2015 2016 2017 2018 2019 2020 2021 2022 2023 2024 2025
การคาดการณ์โดยรวม
อัตราการเติบโตของตลาด
ข้าว. 1. การพยากรณ์ตลาดโลกสำหรับระบบผ่าตัดด้วยหุ่นยนต์ (ไม่รวมระบบการผ่าตัดด้วยรังสี) (ที่มา: Wintergreen Research, BCC Research, Global Data)
ความต้องการความแม่นยำที่เพิ่มขึ้นของการดำเนินการที่ทำ
ตามมูลค่า อุปกรณ์ทางการแพทย์ถือเป็นตลาดหุ่นยนต์บริการระดับมืออาชีพจำนวนมาก ส่วนนี้รวมถึงระบบผ่าตัดด้วยหุ่นยนต์ อุปกรณ์รังสีบำบัด และอุปกรณ์สำหรับการฟื้นฟูผู้ป่วย จากการสำรวจเชิงวิเคราะห์โดย RVC ยอดขายอุปกรณ์ดังกล่าวมีมูลค่า 1.45 พันล้านดอลลาร์หรือ 41% ของมูลค่าหุ่นยนต์มืออาชีพทั้งหมดที่ขายในปี 2556 ไม่รวมระบบทางการทหาร
ตามการคาดการณ์ต่างๆ ปริมาณของตลาดโลกสำหรับระบบหุ่นยนต์ทางการแพทย์ภายในปี 2561 คาดว่าจะอยู่ในช่วง 13.6 พันล้านดอลลาร์ถึง 18 พันล้านดอลลาร์ และภายในปี 2563 มีแนวโน้มว่าจะสูงถึง 20 พันล้านดอลลาร์โดยมีอัตราการเติบโตต่อปีที่ 12 12.6%.
หุ่นยนต์ผ่าตัดคาดว่าจะมีส่วนแบ่งรายได้มากที่สุด
ตามการคาดการณ์โดยรวมของ Winter-green Research, BCC Research, Global Data, ปริมาณโดยประมาณของตลาดสำหรับระบบผ่าตัดด้วยหุ่นยนต์ (ไม่รวมส่วนประกอบและวัสดุสิ้นเปลือง,
ไม่รวมการผ่าตัดด้วยรังสี) ภายในปี 2568 จะมีมูลค่า 6.6 พันล้านดอลลาร์สหรัฐ (รูปที่ 1)
ตลาดโครงกระดูกภายนอกจะกลายเป็นภาคที่แยกจากกันในตลาดอุปกรณ์การแพทย์ทั่วไป ซึ่งคาดว่าจะเติบโตมากยิ่งขึ้นไปอีก จากผลการศึกษา “หุ่นยนต์ฟื้นฟู: ตลาดหุ้น
กลยุทธ์และการคาดการณ์ทั่วโลกตั้งแต่ปี 2558 ถึง 2564 "จาก Wintergreen Research ซึ่งตีพิมพ์ใน Research and Markets ปริมาณการตลาดของหุ่นยนต์และกลไกการฟื้นฟูสมรรถภาพทางการแพทย์ในปี 2557 อยู่ที่ 203.3 ล้านดอลลาร์และคาดว่าจะมีกำไร 1 ดอลลาร์ภายในปี 2564 1 พันล้าน.
วัตถุประสงค์ของการศึกษาครั้งนี้คือเพื่อตรวจสอบบนพื้นฐานของข้อมูลจากการวิเคราะห์หลายเกณฑ์ทางไซเอนโทเมทริกและสิทธิบัตร แนวโน้มหลักในการพัฒนาทางวิทยาศาสตร์และเทคโนโลยีของหุ่นยนต์ทางการแพทย์ในโลก ตลอดจนเพื่อประเมินความสามารถในการแข่งขันของพื้นฐานทางวิทยาศาสตร์และเทคโนโลยีและ ตำแหน่งของรัสเซียในตลาดเทคโนโลยีนี้โดยใช้ตัวอย่างของสองพื้นที่ที่มีการพัฒนาอย่างแข็งขันที่สุดของอุตสาหกรรม:
หุ่นยนต์ Exoskeleton สำหรับการฟื้นฟูผู้ที่มีความผิดปกติของระบบกล้ามเนื้อและกระดูก
การผ่าตัดโดยใช้หุ่นยนต์ช่วย
กระแสหลัก
N CO O "О CNCOtJ-LO" ONCOOsO-- นับ - ^ oO-OOOOOOOOOOOOO-- I- I- I- I- I- OsOvOsOOOOOOOOOOOOOOOOOO | - | - | - CNCNCNCNCNCNCNCNCNCNCNCNCNCN
ข้าว. 2. พลวัตของกิจกรรมสิ่งพิมพ์ในทิศทางของ "เทคโนโลยีสำหรับการสร้างโครงกระดูกภายนอกของหุ่นยนต์สำหรับการฟื้นฟูสมรรถภาพของผู้ที่มีการทำงานของกล้ามเนื้อและกระดูกบกพร่อง"
(อ้างอิงจาก Web of Science Core Collection ณ วันที่ 25 มีนาคม 2558)
การวิเคราะห์ระดับปัจจุบันและแนวโน้มในการพัฒนากิจกรรมการวิจัยในพื้นที่ที่เลือกในโลกและในรัสเซียได้ดำเนินการโดยใช้แหล่งข้อมูลการวิเคราะห์ที่น่าเชื่อถือที่สุดแห่งหนึ่งของโลก - เว็บดัชนีการอ้างอิงระหว่างประเทศ ของคอลเลกชันแกนวิทยาศาสตร์
การศึกษานี้ใช้วิธีการของผู้เขียนในการวิเคราะห์สิทธิบัตรแบบหลายเกณฑ์ของคณะทำงานที่นำโดย N.G. Kurakova ซึ่งรวมถึงการประเมินพลวัตของกิจกรรมสิทธิบัตรในโลกในแง่ของทิศทาง การประเมินการแจกจ่ายเอกสารสิทธิบัตรตามสถานะ การประเมินส่วนแบ่งของคำขอสิ่งประดิษฐ์เมื่อเปรียบเทียบกับส่วนแบ่งของสิทธิบัตรที่ออกและ ตัวชี้วัดอื่นๆ การวิเคราะห์สิทธิบัตรดำเนินการโดยใช้ฐานข้อมูลสิทธิบัตรนวัตกรรมของ Orbit และ Thomson
การวิเคราะห์ไซเอนโทเมตริกและสิทธิบัตรดำเนินการตั้งแต่ปี 2538 ถึง พ.ศ. 2558
เทคโนโลยีสำหรับการสร้าง exoskeleton หุ่นยนต์สำหรับการฟื้นฟูสมรรถภาพผู้ที่มีความผิดปกติของระบบกล้ามเนื้อและกระดูก
โครงกระดูกภายนอกเป็นโครงภายนอกที่ช่วยให้บุคคลทำหน้าที่เกี่ยวกับกล้ามเนื้อและกระดูกได้ง่ายขึ้น ในทางการแพทย์ นี่คือชื่ออุปกรณ์ที่ผู้ทุพพลภาพสามารถใช้เพื่อสนับสนุนการเคลื่อนไหว เช่นเดียวกับการออกกำลังกายเป็นประจำที่มุ่งฟื้นฟูการเคลื่อนไหวที่สูญเสียไป
ตามดัชนีระดับนานาชาติ Web of Science Core Collection ปริมาณสิ่งพิมพ์ในสาขาวิทยาศาสตร์นี้มีการเติบโตแบบทวีคูณ (รูปที่ 2)
ประเทศชั้นนำในด้านจำนวนบทความในโลก ได้แก่ สหรัฐอเมริกา จีน อิตาลี รัสเซียคิดเป็นเพียง 0.1% ของกระแสการตีพิมพ์ทั่วโลก
มีการเติบโตแบบทวีคูณและกิจกรรมสิทธิบัตรในพื้นที่ที่กำลังศึกษาอยู่ในโลก นี่เป็นหลักฐานจากข้อมูลการวิเคราะห์ของเราที่ดำเนินการโดยใช้ฐานข้อมูลสิทธิบัตรสองฐานข้อมูล: Orbit (รูปที่ 3) และ Thomson Innovation (รูปที่ 4)
มีการดึงความสนใจไปที่การเติบโตของจำนวนแอปพลิเคชันสำหรับการประดิษฐ์ ซึ่งมีจำนวนมากกว่าสิทธิบัตรที่ถูกต้อง ซึ่งเป็นสัญญาณของศักยภาพที่ดีในการพัฒนาทิศทางเทคโนโลยี (รูปที่ 5)
ทิศทางที่ขับเคลื่อนคือสหรัฐอเมริกา จีน และสาธารณรัฐเกาหลี - เป็นการระหว่างประเทศเหล่านี้ที่การต่อสู้เพื่อตลาดเฉพาะในอนาคตที่สร้างขึ้นโดยอุปกรณ์ที่มีวัตถุประสงค์การใช้งานดังกล่าวมีแนวโน้มที่จะคลี่คลาย ข้อมูลฐานข้อมูล Orbit (รูปที่ 6) และ Thomson Innovation (รูปที่ 7) แสดงให้เห็นภาพความเป็นผู้นำทางเทคโนโลยีของทั้งสามประเทศในการคาดการณ์การวิเคราะห์สิทธิบัตร
รัสเซียอยู่ในอันดับที่ 11 ในแง่ของจำนวนสิทธิบัตรที่ได้รับจากผู้อยู่อาศัยในประเทศ อย่างไรก็ตาม ส่วนแบ่งของสิทธิบัตรระดับประเทศมีเพียง 1% ของสิทธิบัตรทั่วโลกในพื้นที่นี้ (รูปที่ 6)
การวิเคราะห์การจำหน่ายสิทธิบัตรในช่วงหลายปีที่ผ่านมาทำให้สามารถบันทึกการเปลี่ยนแปลงในผู้นำเทคโนโลยีระดับโลกได้ จากข้อมูลดังนี้
เศรษฐศาสตร์วิทยาศาสตร์ 5015 เล่ม 1 ฉบับที่ 2
กระแสหลัก
ปีที่พิมพ์
"OG ^ OOO" O "- C4CJ ^ fl" ONffl> 0 - CN C "E Yu
O "O" O "O ^ OOOOOOOOOOO---
O "O" O "โอ้โหหหหหหหหหหหหหหหหหหหหหหห
-> --- CNCN (น ข้าว. 3. พลวัตของกิจกรรมสิทธิบัตรในด้าน "เทคโนโลยีสำหรับการสร้างโครงกระดูกภายนอกของหุ่นยนต์สำหรับการฟื้นฟูสมรรถภาพผู้ที่มีความผิดปกติของระบบกล้ามเนื้อและกระดูก" (ตามข้อมูล Orbit ณ วันที่ 25 มีนาคม 2558) ข้าว. 4. พลวัตของกิจกรรมสิทธิบัตรในด้าน "เทคโนโลยีสำหรับการสร้างโครงกระดูกภายนอกของหุ่นยนต์สำหรับการฟื้นฟูสมรรถภาพผู้ที่มีความผิดปกติของระบบกล้ามเนื้อและกระดูก" (ตาม Thomson Innovation ณ วันที่ 13 เมษายน 2558) ข้าว. 5. การจำหน่ายเอกสารสิทธิบัตรตามสถานะทางกฎหมายในแนวทาง "เทคโนโลยีสร้างหุ่น exoskeleton สำหรับการฟื้นฟูสมรรถภาพผู้ที่มีความผิดปกติของระบบกล้ามเนื้อและกระดูก" (ตามข้อมูล Orbit ณ วันที่ 25 มีนาคม 2558) เศรษฐศาสตร์วิทยาศาสตร์ ๒๕๕๕ ปีที่ ๑ ฉบับที่ ๒ กระแสหลัก ประเทศสำคัญ ข้าว. 6. การจำหน่ายสิทธิบัตรทิศทาง "เทคโนโลยีสร้างหุ่น exoskeleton สำหรับการฟื้นฟูสมรรถภาพผู้ที่มีความผิดปกติของระบบกล้ามเนื้อและกระดูก" ตามลำดับความสำคัญของประเทศ (ตามข้อมูล Orbit ณ วันที่ 25 มีนาคม 2558) ข้าว. 7. การจำหน่ายสิทธิบัตรทิศทาง "เทคโนโลยีสร้างโครงกระดูกภายนอกหุ่นยนต์เพื่อการฟื้นฟูสมรรถภาพผู้ที่มีความผิดปกติของระบบกล้ามเนื้อและกระดูก" ตามลำดับความสำคัญของประเทศ (ตาม Thomson Innovation ณ วันที่ 13 เมษายน 2558) นำเสนอในรูป 8 ในการพัฒนาเทคโนโลยีสำหรับการสร้างโครงกระดูกภายนอกของหุ่นยนต์ ตั้งแต่ปีพ.ศ. 2539 นักพัฒนาจากหลายประเทศได้เข้ามามีส่วนร่วม โดยมีส่วนสนับสนุนอย่างเพียงพอต่อการพัฒนาอุตสาหกรรม อย่างไรก็ตาม ตามรายงานของ Thomson Innovation ในปี 2555 จีนได้อันดับหนึ่งในแง่ของจำนวนสิทธิบัตรทั้งหมดที่ได้รับจากผู้อยู่อาศัยในประเทศ กิจกรรมการจดสิทธิบัตรเทคโนโลยีของเกาหลีก็มีการเติบโตอย่างรวดเร็วเช่นกันตั้งแต่ปี 2548 (รูปที่ 8) ข้อมูลการวิเคราะห์สิทธิบัตรที่ได้รับโดยใช้ฐานข้อมูล Orbit ทำให้สามารถสังเกตรูปแบบเดียวกันในการเปลี่ยนแปลงของผู้นำทางเทคโนโลยีได้ จนถึงปี 2006 ผู้เข้าร่วมอุตสาหกรรมหลายคนได้มีส่วนร่วมในการพัฒนาเทคโนโลยีสำหรับการสร้างหุ่นยนต์โครงกระดูกภายนอก ประเทศที่พัฒนาแล้ว โดยเฉพาะกิจกรรมด้านการวิจัยและประดิษฐ์ของสหรัฐ อย่างไรก็ตาม ตั้งแต่ปี 2549 จีนเริ่มเพิ่มกิจกรรมการจดสิทธิบัตรการแก้ปัญหาทางเทคนิคระดับชาติและกลายเป็นผู้นำทางเทคโนโลยีระดับโลกที่ชัดเจนภายในปี 2555 สาธารณรัฐเกาหลียังได้แสดงกิจกรรมการจดสิทธิบัตรเพิ่มขึ้นตั้งแต่ปี 2550 น่าเสียดายที่ทุนสำรองทางวิทยาศาสตร์และเทคโนโลยีของรัสเซีย ในช่วงปี 2550-2556 ไม่สะท้อนหรือปกป้องโดยสิทธิบัตรจำนวนหนึ่งที่เห็นได้ชัดเจน (รูปที่ 9) ในบรรดาสิทธิบัตรของสหพันธรัฐรัสเซียเกี่ยวกับเทคโนโลยีสำหรับการสร้างโครงกระดูกภายนอกนั้น 65% ออกให้กับผู้อยู่อาศัยในประเทศ มากกว่าหนึ่งในสามของสิทธิบัตรในสหพันธรัฐรัสเซียได้รับโดยผู้ที่ไม่ได้อาศัย (รูปที่ 10) เศรษฐศาสตร์วิทยาศาสตร์ 5015 เล่ม 1 ฉบับที่ 2 กระแสหลัก ข้าว. 8. พลวัตของกิจกรรมสิทธิบัตรในด้าน "เทคโนโลยีสำหรับการสร้างโครงกระดูกภายนอกของหุ่นยนต์สำหรับการฟื้นฟูสมรรถภาพผู้ที่มีความผิดปกติของระบบกล้ามเนื้อและกระดูก" ในประเทศต่างๆตามลำดับความสำคัญ (ตาม Thomson Innovation ณ วันที่ 13 เมษายน 2558) ข้าว. 9. พลวัตของกิจกรรมสิทธิบัตรในด้าน "เทคโนโลยีสำหรับการสร้างโครงกระดูกภายนอกของหุ่นยนต์สำหรับการฟื้นฟูสมรรถภาพผู้ที่มีความผิดปกติของระบบกล้ามเนื้อและกระดูก" ในประเทศต่างๆตามลำดับความสำคัญ (ตามข้อมูล Orbit ณ วันที่ 25 มีนาคม 2558) ข้าว. 10. พลวัตของกิจกรรมสิทธิบัตรของผู้อยู่อาศัยในสหพันธรัฐรัสเซียในทิศทางของ "เทคโนโลยีสำหรับการสร้างโครงกระดูกภายนอกของหุ่นยนต์สำหรับการฟื้นฟูสมรรถภาพผู้ที่มีความผิดปกติของระบบกล้ามเนื้อและกระดูก" (ตามข้อมูล Orbit ณ วันที่ 25.03.2015) เศรษฐศาสตร์วิทยาศาสตร์ ๒๕๕๕ ปีที่ ๑ ฉบับที่ ๒ กระแสหลัก ตารางที่ 1 ผู้ถือสิทธิบัตร 10 อันดับแรกของโลกในทิศทางของ "เทคโนโลยีสำหรับการสร้างโครงกระดูกภายนอกของหุ่นยนต์สำหรับการฟื้นฟูสมรรถภาพผู้ที่มีความผิดปกติของระบบกล้ามเนื้อและกระดูก" ผู้ถือสิทธิบัตร จำนวนสิทธิบัตร มหาวิทยาลัยเจ้อเจียง 40 มหาวิทยาลัยเซี่ยงไฮ้เจียวทง 25 มหาวิทยาลัยวิทยาศาสตร์อิเล็กทรอนิกส์และเทคโนโลยีของจีน18 สถาบันเทคโนโลยีฮาร์บิน 17 มหาวิทยาลัยแคลิฟอร์เนีย 14 มูลนิธิความร่วมมืออุตสาหกรรม-มหาวิทยาลัย SOGANG 12 มหาวิทยาลัย JIAOTONG ทางตะวันตกเฉียงใต้ 11 มหาวิทยาลัยปักกิ่งแห่งเทคโนโลยี 10 มหาวิทยาลัยเซี่ยงไฮ้เพื่อวิทยาศาสตร์และเทคโนโลยี 9 ที่มา: ตามฐานข้อมูล Orbit ณ วันที่ 25 มีนาคม 2558 ตาราง 1 แสดงผู้ถือสิทธิบัตร 10 อันดับแรกของโลกที่มีพอร์ตสิทธิบัตรที่ใหญ่ที่สุดในสาขานี้ สิทธิบัตรส่วนใหญ่ที่มีลำดับความสำคัญของรัสเซียเป็นของมหาวิทยาลัยแห่งรัฐมอสโกซึ่งได้รับการตั้งชื่อตาม M.V. โลโมโนซอฟ (45%) เทคโนโลยีการผ่าตัดด้วยหุ่นยนต์ การผ่าตัดโดยใช้หุ่นยนต์ช่วยเป็นความสำเร็จล่าสุดในด้านเทคโนโลยีส่องกล้องและการผ่าตัดแบบแผลผ่าตัดน้อยที่สุด ซึ่งบ่งบอกถึงการบาดเจ็บจากการผ่าตัดน้อยที่สุดและบรรเทาอาการปวดในผู้ป่วย มีข้อดีหลายประการสำหรับการผ่าตัดด้วยหุ่นยนต์ซึ่งแนะนำว่าการนำเทคโนโลยีมาใช้อย่างแพร่หลายจะช่วยยกระดับการผ่าตัดโดยรวมไปสู่ระดับใหม่: การเปลี่ยนแปลงขั้นพื้นฐานในการทำงานของศัลยแพทย์โดยมีความเป็นไปได้ที่หลากหลาย ปรับปรุงการแสดงภาพ 3 มิติของโครงสร้างทางกายวิภาค โดยเฉพาะอย่างยิ่งการรวมกลุ่มของหลอดเลือด ให้การรับประกันการปฏิบัติงานที่มีคุณภาพสูงโดยผู้เชี่ยวชาญรุ่นเยาว์หลังจากจบหลักสูตรการฝึกอบรมเฉพาะทาง ดำเนินการที่มีคุณภาพสูงในพื้นที่กายวิภาคเหล่านั้นซึ่งก่อนหน้านี้เป็นไปไม่ได้ที่จะดำเนินการแทรกแซงการบุกรุกน้อยที่สุด การตัดเนื้อเยื่ออย่างระมัดระวังและ "อ่อนโยน" ไม่มีการสั่นสะเทือน การลากและการเคลื่อนตัวของอวัยวะที่อยู่ติดกันน้อยที่สุด กิจกรรมการตีพิมพ์ในด้าน "การผ่าตัดด้วยหุ่นยนต์" ตาม Web of Science Core Collection มีการเติบโตอย่างต่อเนื่องในช่วงยี่สิบปีที่ผ่านมา (รูปที่ 11) ผู้นำด้านสิ่งพิมพ์คือสหรัฐอเมริกา เยอรมนี และญี่ปุ่น ส่วนแบ่งสิ่งพิมพ์ของรัสเซียอยู่ที่ 0.1% ของกระแสทั่วโลก (ที่ 41 ของโลก) กิจกรรมของการจดสิทธิบัตรโซลูชั่นเทคโนโลยีในพื้นที่ที่กำลังศึกษาก็มีการเติบโตแบบทวีคูณตามฐานข้อมูล Orbit (รูปที่ 12) และฐานข้อมูล Thomson Innovation (รูปที่ 13) จำนวนสิทธิบัตรที่ได้รับในแต่ละปี เริ่มตั้งแต่ปี 2552 ประมาณสองร้อย เศรษฐศาสตร์วิทยาศาสตร์ 5015 เล่ม 1 ฉบับที่ 2 กระแสหลัก 400 -350 -300 -250 -200 - "ONCOO ^ O" -CNn "ครีบ" ONCOO "O ^ Wn ^ iO เกี่ยวกับ "OO-OOOOOOOOOO-- O "O" OCNOOOOOOOOOOOOOO . ออ CNCNCNCNCNCNCNCMCNCNCNCNCNCNCNCN ข้าว. 11. พลวัตของกิจกรรมสิ่งพิมพ์ในทิศทางของ "เทคโนโลยีการผ่าตัดด้วยหุ่นยนต์ช่วย" (อ้างอิงจาก Web of Science Core Collection ณ วันที่ 24 มีนาคม 2558) Nami และจำนวนคำขอรับสิทธิบัตรเพิ่มขึ้นอย่างทวีคูณ (รูปที่ 14) สหรัฐอเมริกา, สาธารณรัฐเกาหลี, จีนควรอ้างถึงจำนวนผู้นำด้านเทคโนโลยีของทิศทาง - นี่คือหลักฐานจากข้อมูลของฐานข้อมูล Orbit (รูปที่ 15) และข้อมูลของการวิเคราะห์สิทธิบัตรที่ดำเนินการโดยใช้ฐานข้อมูล Thomson Innovation ( มะเดื่อ 16) สหรัฐอเมริกาถูกระบุว่าเป็นประเทศที่มีความสำคัญในครึ่งหนึ่งของเอกสารสิทธิบัตรที่ออกในพื้นที่นี้ ส่วนแบ่งของสิทธิบัตรที่ได้รับจากผู้อยู่อาศัยในรัสเซียนั้นเป็นเพียง 1.91% ของจำนวนเอกสารสิทธิบัตรทั้งหมดของโลก ด้วยตัวบ่งชี้นี้ สหพันธรัฐรัสเซียครองอันดับที่ 8 แต่ตามหลังจีนซึ่งครองตำแหน่งที่สามในการจัดอันดับพอร์ตสิทธิบัตร 6.7 เท่าในตัวบ่งชี้นี้ (รูปที่ 15) ข้าว. 12. พลวัตของกิจกรรมสิทธิบัตรในด้าน "เทคโนโลยีการผ่าตัดด้วยหุ่นยนต์" (ตามข้อมูล Orbit ณ วันที่ 24 มีนาคม 2558) ข้าว. 13. พลวัตของกิจกรรมสิทธิบัตรในด้าน "เทคโนโลยีการผ่าตัดด้วยหุ่นยนต์" (ตามข้อมูล Thomson Innovation ณ วันที่ 13 เมษายน 2558) เศรษฐศาสตร์วิทยาศาสตร์ ๒๕๕๕ ปีที่ ๑ ฉบับที่ ๒ กระแสหลัก ■ ไม่ใช้งาน ■ แอปพลิเคชัน ■ ใช้งานอยู่ US WO KR CN DE EP JP RU GB FR CA IT ES AU UA ประเทศที่มีลำดับความสำคัญ มะเดื่อ 14. การกระจายเอกสารสิทธิบัตรตามสถานะทางกฎหมายในด้าน "เทคโนโลยีการผ่าตัดด้วยหุ่นยนต์" (ตามข้อมูล Orbit ณ วันที่ 24 มีนาคม 2558) ข้าว. 15. การจำหน่ายสิทธิบัตรทิศทาง "เทคโนโลยีการผ่าตัดด้วยหุ่นยนต์" ตามลำดับความสำคัญของประเทศ (ตามข้อมูล Orbit ณ วันที่ 24 มีนาคม 2558) ข้าว. 16. การจำหน่ายสิทธิบัตรด้าน "เทคโนโลยีการผ่าตัดด้วยหุ่นยนต์" ตามลำดับความสำคัญของประเทศ (ตาม Thomson Innovation ณ วันที่ 13 เมษายน 2558) เศรษฐศาสตร์วิทยาศาสตร์ 5015 เล่ม 1 ฉบับที่ 2 กระแสหลัก ข้าว. 17. พลวัตของกิจกรรมสิทธิบัตรด้าน "เทคโนโลยีการผ่าตัดด้วยหุ่นยนต์" ในประเทศต่างๆ ตามลำดับความสำคัญ (ตามข้อมูล Thomson Innovation ณ วันที่ 13 เมษายน 2558) ข้าว. 18. พลวัตของกิจกรรมสิทธิบัตรในด้าน "เทคโนโลยีการผ่าตัดด้วยหุ่นยนต์" ในประเทศต่างๆ ตามลำดับความสำคัญ (ตามข้อมูล Orbit ณ วันที่ 24 มีนาคม 2558) RU WO US EP CA IT ES KR DE FR ประเทศสำคัญ ข้าว. 19. พลวัตของกิจกรรมสิทธิบัตรของผู้อยู่อาศัยในสหพันธรัฐรัสเซียในด้าน "เทคโนโลยีการผ่าตัดด้วยหุ่นยนต์ช่วย" (ตามข้อมูล Orbit ณ วันที่ 24 มีนาคม 2558) เศรษฐศาสตร์วิทยาศาสตร์ ๒๕๕๕ ปีที่ ๑ ฉบับที่ ๒ กระแสหลัก ตารางที่ 2 ผู้ถือสิทธิบัตร 10 อันดับแรกของโลกในด้าน "เทคโนโลยีการผ่าตัดด้วยหุ่นยนต์" ปริมาณ สิทธิบัตร การผ่าตัดที่ชาญฉลาด 246 เอธิคอน เอนโด ศัลยกรรม 45 SAMSUNG ELECTRONICS 39 ฮันเซ่น เมดิคอล 39 มหาวิทยาลัยจอห์นฮอปกินส์ 30 DEUTSCH ZENTR LUFT & RAUMFAHRT 25 มหาวิทยาลัยเทียนจิน 24 การผ่าตัดโดยสัญชาตญาณ 23 ที่มา: (ตามข้อมูล Orbit ณ วันที่ 24 กุมภาพันธ์ 2558) จากฐานข้อมูลของ Thomson Innovation สหรัฐอเมริกายังคงความเป็นผู้นำในฐานะประเทศที่มีความสำคัญอันดับแรกตั้งแต่ปี 1995 จนถึงปัจจุบัน ในสาธารณรัฐเกาหลี พลเมืองได้รับสิทธิบัตรฉบับแรกในปี 2549 และโดยชาวจีนในปี 2546 แต่วันนี้ทั้งสองประเทศมีส่วนร่วมอย่างแข็งขันในการต่อสู้เพื่อตลาดอุปกรณ์ผ่าตัดด้วยหุ่นยนต์ (รูปที่ 17) ฐาน Orbit แสดงให้เห็นแนวโน้มเดียวกัน นักวิจัยในสหรัฐอเมริกาได้แสดงกิจกรรมการจดสิทธิบัตรที่สูงอย่างต่อเนื่องในภาคสนามตลอดระยะเวลาการสังเกตการณ์ 20 ปีทั้งหมด และตั้งแต่ปีพ.ศ. 2549 จีนและสาธารณรัฐเกาหลีได้เข้าสู่การต่อสู้เพื่อความเป็นผู้นำ น่าเสียดายที่รัสเซียเป็นประเทศที่มีลำดับความสำคัญสูงสำหรับสิทธิบัตรฉบับเดียวในช่วงระหว่างปี 2545 ถึง พ.ศ. 2556 (รูปที่ 18) โดยรวมแล้ว มีการออกสิทธิบัตร 64 ฉบับของสหพันธรัฐรัสเซียสำหรับการแก้ปัญหาในด้านเทคโนโลยีการผ่าตัดโดยใช้หุ่นยนต์ช่วย โดย 40 ฉบับเป็นของผู้สมัครชาวรัสเซีย การจำหน่ายสิทธิบัตร RF ตามประเทศที่มีลำดับความสำคัญสูง (รูปที่ 19) แสดงให้เห็นว่าผู้ที่ไม่ใช่ผู้มีถิ่นที่อยู่ประจำคิดเป็น 37.5% ของสิทธิบัตรที่ออกใน RF ซึ่งส่วนใหญ่ออกให้กับบริษัทในสหรัฐอเมริกา ตาราง 2 นำเสนอผู้ถือสิทธิบัตร 10 อันดับแรกของโลกในด้านการผ่าตัดด้วยหุ่นยนต์ช่วย ผู้นำที่แท้จริงในหมู่พวกเขาคือบริษัท Intuitive Surgical (USA) ซึ่งกลายมาเป็นผู้พัฒนาระบบ "ดาวินชี". กลุ่มสิทธิบัตรของบริษัทมีความซับซ้อนอย่างมากในการพัฒนาตลาดการผ่าตัดโดยใช้หุ่นยนต์ช่วย เนื่องจากได้ปิดโซลูชันการออกแบบพื้นฐานและองค์ประกอบของหุ่นยนต์ผ่าตัด แต่ดังที่เห็นได้จากตัวอย่างของจีนและสาธารณรัฐเกาหลี โซลูชันทางเทคโนโลยีใหม่ ๆ ยังคงพบได้ในบริบทของการพัฒนาเทคโนโลยีอย่างแข็งขันด้วยการผูกขาดที่เห็นได้ชัด Ethicon Endo Surgery ซึ่งครองตำแหน่งที่สามในการจัดอันดับได้รับ 4 สิทธิบัตรจากสหพันธรัฐรัสเซีย ผู้ถือสิทธิบัตรของรัสเซียในด้าน "เทคโนโลยีการผ่าตัดด้วยหุ่นยนต์" เป็นตัวแทนของบริษัทและมหาวิทยาลัยที่มีสิทธิบัตร 1-2 ฉบับ บทสรุป ข้อมูลที่นำเสนอไม่อนุญาตให้ระบุลักษณะพื้นฐานทางวิทยาศาสตร์และเทคโนโลยีของสหพันธรัฐรัสเซียในด้านโครงกระดูกภายนอกของหุ่นยนต์สำหรับการฟื้นฟูสมรรถภาพผู้ที่มีความผิดปกติของระบบกล้ามเนื้อและกระดูกและการผ่าตัดด้วยหุ่นยนต์ช่วยในการแข่งขัน น่าเสียดายที่ไม่สามารถหาสิทธิบัตรของบริษัทเทคโนโลยีในประเทศได้ ซึ่งแสดงถึงความเต็มใจของผู้ผลิตรายหลังที่จะนำเสนอผลิตภัณฑ์แบบอนุกรม ไม่เพียงแต่กับทั่วโลกเท่านั้น แต่ยังรวมถึงตลาดในประเทศด้วย เศรษฐศาสตร์วิทยาศาสตร์ 5015 เล่ม 1 ฉบับที่ 2 กระแสหลัก ในขณะเดียวกัน อัตราการเติบโตของตลาดโลกสำหรับศัลยแพทย์หุ่นยนต์และโครงกระดูกภายนอกของหุ่นยนต์สำหรับการฟื้นฟูสมรรถภาพผู้ที่มีความผิดปกติของระบบกล้ามเนื้อและกระดูก ทำให้สามารถระบุลักษณะเฉพาะของพวกเขาว่าเป็นคนใหม่และเติบโตแบบไดนามิก ดังนั้นนักพัฒนาชาวรัสเซียจึงมีโอกาสเข้ายึดตลาดเฉพาะ ความจำเป็นในการพัฒนาใหม่ของรัสเซียในการผ่าตัดด้วยหุ่นยนต์ก็เนื่องมาจากข้อบกพร่องหลายประการในระบบ Da Vinci ที่ใช้ในโลก: ขาดความรู้สึกสัมผัสที่ศัลยแพทย์; น้ำหนักและขนาดของระบบมาก การเตรียมตัวสำหรับการผ่าตัดเป็นเวลานาน ขาดระบบติดตามเป้าหมาย (ไซต์พยาธิวิทยา); มุมมองขนาดเล็ก (ขาดการมองเห็นอุปกรณ์ต่อพ่วง) สำหรับผู้ควบคุมคอนโซลของศัลยแพทย์ ใช้กลไกเดียวในการเคลื่อนไหวที่แตกต่างกัน การวางโทรคาร์เป็นเวลานานเมื่อเปรียบเทียบกับการผ่าตัดผ่านกล้องแบบมาตรฐาน ขาดการติดต่อกับผู้ป่วย ขาดการมองเห็น 3 มิติสำหรับแพทย์ที่ช่วยเหลือผู้ป่วยโดยตรง นอกเหนือจากพื้นที่ดังกล่าวของการพัฒนาเทคโนโลยีของระบบเหล่านี้แล้ว ควรสังเกตลักษณะต้นทุนของระบบดาวินชีและเครื่องมือและอุปกรณ์เสริมส่วนบุคคลโดยเฉพาะ (ต้นทุนเฉลี่ยของหนึ่งคอมเพล็กซ์คือ 3 ล้านยูโร) การฝึกอบรมบุคลากรให้ทำงานกับระบบได้เฉพาะในต่างประเทศ การสนับสนุนด้านเทคนิคและการบำรุงรักษาระบบในอาณาเขตของรัสเซียเป็นปัญหาใหญ่ ข้อบกพร่องที่ระบุไว้ทั้งหมดสร้างข้อกำหนดเบื้องต้นที่ยอดเยี่ยมสำหรับการส่งเสริมการพัฒนาการนำเข้าแทนของวิศวกรในประเทศ ซึ่งหมายความว่าการรวมเทคโนโลยีสำหรับการสร้างโครงกระดูกภายนอกของหุ่นยนต์สำหรับการฟื้นฟูสมรรถภาพผู้ที่มีความผิดปกติของระบบกล้ามเนื้อและกระดูกและการผ่าตัดโดยใช้หุ่นยนต์ช่วยในลำดับความสำคัญของวิทยาศาสตร์และเทคโนโลยี การพัฒนาของรัสเซียนั้นสมเหตุสมผลอย่างสมบูรณ์ วรรณกรรม 1. Kraevsky S.V. , Rogatkin D.A. วิทยาการหุ่นยนต์ทางการแพทย์: ก้าวแรกของหุ่นยนต์ทางการแพทย์ // เทคโนโลยีของระบบสิ่งมีชีวิต 2553 .-- ต. 7. - ลำดับที่ 4 - ส. 3-14. 2. รายงานจากผู้เชี่ยวชาญและการวิเคราะห์ "ศักยภาพของนวัตกรรมของรัสเซียในตลาดระบบอัตโนมัติและหุ่นยนต์" 2014. รายงานนี้จัดทำโดย Larza LLC ตามคำสั่งของ RVC OJSC Http://www.rusventure.ru/ru/programm/analy-tics/docs/Otchet_robot-FINAL%>20291014.pdf 3. การวิจัยตลาดโปร่งใส. ตลาดระบบหุ่นยนต์ทางการแพทย์ (หุ่นยนต์ผ่าตัด, ระบบหุ่นยนต์ผ่าตัดด้วยรังสีแบบไม่รุกราน, อวัยวะเทียมและโครงกระดูกภายนอก, หุ่นยนต์ช่วยเหลือและฟื้นฟู, หุ่นยนต์ที่ไม่ใช่ทางการแพทย์ในโรงพยาบาล และระบบหุ่นยนต์ตอบสนองฉุกเฉิน) - การวิเคราะห์อุตสาหกรรมระดับโลก, ขนาด, ส่วนแบ่ง, การเติบโต, แนวโน้มและการคาดการณ์ 2555-2561 - http: // www.transparencymarketresearch.com/medical-robotic-systems.html 4. Titan Medical สามารถบุกตลาดศัลยกรรมหุ่นยนต์ได้หรือไม่? 27 มีนาคม 2014 โดย Alpha Deal Group LLC - http://alphanow.thomsonreuters.com/ 2014/03 / titan-storm-robotic-surgery-market / # 5. ตลาดหุ่นยนต์ฟื้นฟูจนถึงปี 2021 - http://robolovers.ru/robots/post/783338/ry-nok_reabilitatsionnyh_robotov_do_2021_goda/ 6. Kurakova N.G. , Zinov V.G. , Tsvetkova L.A. , Eremchenko O.A. , Komarova A.V. , Komarov V.M. , Sorokina A.V. , Pavlov P.N. , Kotsyubinsky V.A. แบบจำลองวิทยาศาสตร์ของ "การตอบสนองอย่างรวดเร็ว" ในสหพันธรัฐรัสเซีย: วิธีการและองค์กร - M.: Delo Publishing House, RANEPA, 2014. - 160 p. 1. Kraevskij S.V, Rogatkin D.A. หุ่นยนต์ทางการแพทย์: ขั้นตอนแรกของหุ่นยนต์ทางการแพทย์ // เทคโนโลยีของระบบที่มีชีวิต - 2010. - คือ. 7. - ลำดับที่ 4. - หน้า 3-14. 2. รายงานการวิเคราะห์โดยผู้เชี่ยวชาญ "ศักยภาพของนวัตกรรมของรัสเซียในตลาดระบบอัตโนมัติและ เศรษฐศาสตร์วิทยาศาสตร์ ๒๕๕๕ ปีที่ ๑ ฉบับที่ ๒_______ robototronics "(2014) รายงานจัดทำโดย LLC" Larza "ในนามของ JSC" RVK " http://www.rus-venture.ru/ru/programm/analytics/docs/Otchet_ robot-FINAL% 20291014.pdf กระแสหลัก 3. การวิจัยตลาดโปร่งใส. ตลาดระบบหุ่นยนต์ทางการแพทย์ (หุ่นยนต์ผ่าตัด, ระบบหุ่นยนต์ผ่าตัดด้วยรังสีแบบไม่รุกราน, อวัยวะเทียมและโครงกระดูกภายนอก, หุ่นยนต์ช่วยเหลือและฟื้นฟู, หุ่นยนต์ที่ไม่ใช่ทางการแพทย์ในโรงพยาบาล และระบบหุ่นยนต์ตอบสนองฉุกเฉิน) - การวิเคราะห์อุตสาหกรรมระดับโลก, ขนาด, ส่วนแบ่ง, การเติบโต, แนวโน้มและการพยากรณ์ 2555-2561. - http://www.transparencymarketrese-arch.com/medical-robotic-systems.html 4. Titan Medical สามารถบุกตลาดศัลยกรรมหุ่นยนต์ได้หรือไม่? (2014) Alpha Deal Group LLC. http: // alphanow.thomsonreuters.com/2014/03/ti- ตาลพายุหุ่นยนต์ตลาดศัลยกรรม / #. 5. ตลาดหุ่นยนต์ฟื้นฟูจนถึงปี 2564 ( 2558) http://robolovers.ru/robots/post/783338/ rynok_reabilitatsionnyh_robotov_do_2021_goda /. 6. Kurakova N.G. , Zinov V.G. , Tsvetkova L.A. , Ye-remchenko O.A. , Komarova A.V. Komarov V.M. , Sorokina A.V. , Pavlov P.N. , Kotsubinskiy V.A. (2014) แบบจำลองของวิทยาศาสตร์ "การดำเนินการโดยตรง" ในสหพันธรัฐรัสเซีย: วิธีการและองค์กร // สำนักพิมพ์ "Delo" RANEPA - 160 น. Cherchenko O.V. , Sheptunov S.A. การผ่าตัดโดยใช้หุ่นยนต์ช่วยและโครงกระดูกภายนอกของหุ่นยนต์เพื่อการฟื้นฟู: ผู้นำด้านเทคโนโลยีระดับโลกและมุมมองของรัสเซีย (ผู้อำนวยการโครงการวิทยาศาสตร์และเทคนิคแห่งรัฐ, มอสโก, รัสเซีย; สถาบันเพื่อการออกแบบและเทคโนโลยีสารสนเทศ Russian Academy of Sciences, มอสโก, รัสเซีย) บทคัดย่อ มีการวิเคราะห์กิจกรรมการตีพิมพ์และสิทธิบัตรเกี่ยวกับสองส่วนที่มีการพัฒนาอย่างแข็งขันในด้านหุ่นยนต์ทางการแพทย์: หุ่นยนต์ - โครงกระดูกภายนอกสำหรับการฟื้นฟูสมรรถภาพผู้ที่มีความผิดปกติของระบบกล้ามเนื้อและกระดูกและการผ่าตัดโดยใช้หุ่นยนต์ช่วย มีการระบุความแตกต่างในโครงสร้างของสิ่งพิมพ์ระดับโลกและระดับประเทศและกระแสสิทธิบัตร มีการเปิดเผยข้อเสียของนวัตกรรมต่างประเทศในการผ่าตัดด้วยหุ่นยนต์ซึ่งสร้างข้อกำหนดเบื้องต้นสำหรับการส่งเสริมนวัตกรรมทดแทนการนำเข้าของวิศวกรในประเทศ คำสำคัญ: การผ่าตัดโดยใช้หุ่นยนต์ช่วย โครงกระดูกภายนอกของหุ่นยนต์เพื่อการฟื้นฟูสมรรถภาพผู้ที่มีความผิดปกติของระบบกล้ามเนื้อและกระดูก ผู้นำด้านเทคโนโลยี ความสามารถในการแข่งขัน การวิเคราะห์ไซเอนโทเมตริก การวิเคราะห์สิทธิบัตร เอกสารกำกับดูแลใหม่ แผนการวิจัยทางวิทยาศาสตร์ของ RAS ได้รับการอนุมัติโดย FANO . แล้ว มติของรัฐบาลสหพันธรัฐรัสเซียเมื่อวันที่ 29 พฤษภาคม 2558 ฉบับที่ 522 "ในบางประเด็นของ หน่วยงานของรัฐบาลกลางองค์กรวิทยาศาสตร์และสหพันธรัฐ สถาบันงบประมาณ""สถาบันวิทยาศาสตร์แห่งรัสเซีย" ตามกฎใหม่สำหรับการประสานงานกิจกรรมของ FASO และ RAS ฝ่ายหลังต้องประสานงานกับ FASO ในแผนการดำเนินการวิจัยที่พัฒนาโดยองค์กรทางวิทยาศาสตร์ภายในกรอบของโครงการวิจัยทางวิทยาศาสตร์ขั้นพื้นฐานของสถาบันวิทยาศาสตร์แห่งรัฐสำหรับปี 2556-2563 FANO อนุมัติตามข้อตกลงกับ RAS โปรแกรมสำหรับการพัฒนาองค์กรทางวิทยาศาสตร์ รวมถึงการมอบหมายงานของรัฐสำหรับการวิจัยทางวิทยาศาสตร์ขั้นพื้นฐานและเชิงสำรวจขององค์กรที่อยู่ภายใต้หน่วยงาน ในกรณีที่ความขัดแย้งที่แก้ไขไม่ได้เกิดขึ้นระหว่างหน่วยงานและ RAS งานที่จะเอาชนะพวกเขาจะถูกโอนไปยังรองนายกรัฐมนตรีซึ่งประสานงานการทำงานของหน่วยงานผู้บริหารของรัฐบาลกลางเกี่ยวกับนโยบายของรัฐในด้านวิทยาศาสตร์ 130 _________________________________________________ เศรษฐศาสตร์วิทยาศาสตร์ 2558 ปีที่ 1 ฉบับที่ 2 อุปกรณ์ต่างๆ เช่น เครื่องจำลองเพื่อการฟื้นฟูและกายภาพบำบัด ใช้เพื่อวัตถุประสงค์ในการรักษาเพื่อฟื้นฟูผู้ป่วยจากการผ่าตัดและการบาดเจ็บ ตลอดจนป้องกันความผิดปกติของการทำงานของร่างกาย LLC "M.P.A. พันธมิตรทางการแพทย์” เสนออุปกรณ์การฟื้นฟูสมรรถภาพและกายภาพบำบัดที่มีเทคโนโลยีสูงของแบรนด์ระดับโลกที่มีชื่อเสียง นอกจากนี้เรายังออกแบบสำนักงานเฉพาะทางในโรงพยาบาล คลินิก สถานพยาบาล ศูนย์กีฬา ฟิตเนสคลับ และบริการหลังการขายสำหรับอุปกรณ์ออกกำลังกาย นักศึกษา นักศึกษาระดับบัณฑิตศึกษา นักวิทยาศาสตร์รุ่นเยาว์ที่ใช้ฐานความรู้ในการศึกษาและการทำงานจะขอบคุณเป็นอย่างยิ่ง การพิจารณาหลักการทำงานของหุ่นยนต์แพทย์ "ดา วินชี" ซึ่งช่วยให้ศัลยแพทย์ทำการผ่าตัดที่ซับซ้อนได้โดยไม่ต้องสัมผัสตัวผู้ป่วย และสร้างความเสียหายต่อเนื้อเยื่อน้อยที่สุด การประยุกต์ใช้หุ่นยนต์และนาโนเทคโนโลยีสมัยใหม่ในการแพทย์และความสำคัญ บทคัดย่อ เพิ่มเมื่อ 01/12/2011 คำอธิบายประวัติความเป็นมาของการพัฒนาหุ่นยนต์และการประยุกต์ใช้ในการผ่าตัดโดยใช้โปรแกรมควบคุมดาวินชีอัตโนมัติด้วยเครื่องมือ Endo Wrist การสร้างแคปซูลลอยน้ำที่มีห้องและระบบ ARES endoluminal บทคัดย่อ เพิ่มเมื่อ 06/07/2011 การจัดการมือที่ถูกต้องและทันเวลาเป็นการรับประกันความปลอดภัยของบุคลากรทางการแพทย์และผู้ป่วย ระดับการประมวลผลด้วยมือ: ครัวเรือน, ถูกสุขอนามัย, ศัลยกรรม ข้อกำหนดพื้นฐานสำหรับน้ำยาฆ่าเชื้อที่มือ มาตรฐานยุโรปสำหรับการประมวลผลด้วยมือ EN-1500 เพิ่มการนำเสนอเมื่อ 06/24/2014 การประยุกต์ใช้ในการแพทย์ของอุปกรณ์จุลทรรศน์บนพื้นฐานของนาโนเทคโนโลยี การสร้างไมโครดีไวซ์สำหรับการทำงานภายในร่างกาย วิธีการทางอณูชีววิทยา เซ็นเซอร์และเครื่องวิเคราะห์นาโนเทคโนโลยี ภาชนะสำหรับนำส่งยาและเซลล์บำบัด บทคัดย่อ เพิ่ม 03/08/2011 การปฐมพยาบาลในกรณีเกิดอุบัติเหตุ ภัยพิบัติ และอุบัติเหตุ กฎทั่วไปสำหรับการอุ้มและยกผู้ประสบภัยบนเปลหามและไม่มีผู้บาดเจ็บที่กระทบกระเทือนจิตใจต่างๆ วิธีการเคลื่อนย้ายผู้ประสบภัยจากแหล่งภัยพิบัติหรืออุบัติเหตุ บทคัดย่อ เพิ่ม 02/27/2009 สาเหตุ พยาธิสภาพ และรูปร่างของมะเร็งทวารหนัก ตัวบ่งชี้การเกิดมะเร็ง ค่าพยากรณ์ของพวกมัน เกณฑ์หลักในการประเมินผลลัพธ์ของการศึกษาอิมมูโนฮิสโตเคมีและผลลัพธ์ของภาวะ PKK ในผู้ป่วยหลังการผ่าตัดรักษาแบบหัวรุนแรง วิทยานิพนธ์, เพิ่ม 05/19/2013 ลักษณะทั่วไปและลักษณะเด่นของวิธีการตรวจผู้ป่วยแบบต่างๆ ที่ใช้ในการแพทย์แผนปัจจุบัน ขั้นตอนและเครื่องมือในการสำรวจ แนวคิดและสาเหตุ ประเภทของการหายใจสั้น ทิศทางการวิจัย เพิ่มบทคัดย่อเมื่อ 02/12/2013 ความหลากหลายของความสนใจและความสามารถของ Leonardo da Vinci ศิลปินทำการผ่ากายวิภาคสร้างระบบภาพของอวัยวะและส่วนต่าง ๆ ของร่างกายในส่วนตัดขวาง การวิจัยในสาขากายวิภาคเปรียบเทียบ เนื้อหาของรายการไดอารี่ เพิ่มการนำเสนอเมื่อ 10/28/2013อุปกรณ์สำหรับการฟื้นฟูในบริษัทของเรา
ส่งงานที่ดีของคุณในฐานความรู้เป็นเรื่องง่าย ใช้แบบฟอร์มด้านล่าง
เอกสารที่คล้ายกัน