Privire de ansamblu asupra stării roboticii în medicina restaurativă
1. Clasificarea roboților medicali
Pentru a sistematiza sistemele robotizate cunoscute și posibile (RTS) în medicină, au fost propuse o serie de clasificări. Au fost utilizate următoarele caracteristici de clasificare: invazivitatea procedurii, siguranță, mobilitate, ergonomie, control ca management sau diagnostic. Una dintre opțiunile de clasificare, ținând cont de cele mai recente realizări în robotica medicală, este prezentată în Fig. 1. Principalele trei clase sunt roboți pentru medicina restaurativă, roboți pentru susținerea vieții și roboți pentru chirurgie, terapie și diagnosticare. Ele reprezintă principalele domenii ale roboticii medicale, deși aceste clase și subclasele lor nu sunt independente în modurile indicate mai sus. În plus, în secțiunile 3 - 5, sunt luați în considerare reprezentanții subclaselor de medicină restaurativă indicate în clasificare.
Fig.1
2. Conceptul de dezvoltare și implementare a roboților în medicina restaurativă pentru oameni sănătoși
Medicina restaurativă este un sistem de activități medicale care vizează diagnosticarea rezervelor funcționale, menținerea și restabilirea sănătății umane prin îmbunătățirea sănătății și reabilitarea medicală. Recuperarea trebuie înțeleasă ca un set de măsuri preventive care vizează restabilirea rezervelor funcționale reduse și a capacităților de adaptare ale organismului la indivizi practic sănătoși. Rolul deosebit al medicinei preventive a fost remarcat de laureatul Nobel I.P. Pavlov (Fig. 2). În cuvintele sale: „Medicina preventivă își atinge scopurile sociale numai în cazul trecerii de la medicina patologiei la medicina sănătății celor sănătoși”.

Fig.2
Conceptul de medicină restaurativă diferă în mod esențial de conceptul de reabilitare medicală, care este un set de măsuri de diagnostic și tratament și profilactic care vizează restabilirea sau compensarea funcțiilor afectate ale corpului uman și handicapul la persoanele bolnave și persoanele cu dizabilități.
Reabilitarea este consolidarea efectului terapeutic în procesul de recuperare a pacientului după o boală. Spre deosebire de reabilitare, care asigură restabilirea sănătății la o persoană bolnavă, medicina restaurativă vizează reproducerea rezervelor de sănătate pierdute. Arsenalul terapeutic și de îmbunătățire a sănătății al medicinei restaurative asigură persoanei activitate socială și creativă în profesia sa, adică eficiență în condițiile în care se desfășoară activitatea sa profesională. Reabilitarea se concentrează în principal pe patologia organelor și, în consecință, aparatul său criteriu evaluează gradul de revenire la normal. Instrumentele metodologice ale medicinei de restaurare sunt redirecționate de la căutarea simptomelor bolii la evaluarea capacităților funcționale de rezervă ale organismului, în special la acele sarcini, condiții de muncă în care o persoană lucrează.
Conceptul dezvoltării asistenței medicale și a științei medicale în Federația Rusă pentru perioada până în 2010 se bazează pe modelul centrat pe sănătate al sistemului de îngrijire a sănătății dezvoltat de RNCVMiK sub conducerea academicianului AN Razumov (Fig. 3) . Esența modelului este accentul pus pe menținerea sănătății unei persoane sănătoase și, în consecință, pe medicina restaurativă.

Fig.3
În viitor, cele mai multe dintre studiile acestei monografii vor fi legate de contingentul nu numai de răniți în operațiuni militare, la locul de muncă, în sport, de persoane cu paralizie cerebrală, de pacienți post-AVC, ci și de oameni sănătoși, obosiți de fizic și activitatea mentală, reducându-le capacitatea de muncă. De exemplu, profesorii și studenții universitari. Este oportun să spunem aici despre sistemul în curs de dezvoltare de învățământ intensiv informatizat, care, pentru a crește eficiența educației, presupune concentrarea eforturilor atât a elevilor, cât și a profesorilor, fără a le compromite sănătatea. Pentru ei este necesară medicina restaurativă considerată în monografie.
Medicina restaurativă include o serie de terapii, inclusiv cele non-medicamentale, dintre care unul dintre tipuri este mecanoterapia. Dintre multele mijloace cunoscute de mecanoterapie, robotica are cel mai mare potențial.
În 1882, omul de știință rus N.V. Zabludovsky (Fig. 4). „Nu este posibil să profităm de îmbunătățirile aduse mecanicii pentru construcția unor astfel de mașini care să înlocuiască acțiunile mâinilor, sau nici măcar acțiunea mașinilor nu ar fi de preferat acțiunii mâinilor? Ar merita să inventăm o mașină, a cărei putere ar putea fi determinată în fiecare moment în numere și în locul muncii masajului, în funcție de sentimentul muscular subiectiv, să se ocupe de munca exprimată în cifre. Cu alte cuvinte, în loc să luați cantitatea de agent de vindecare cu ochiul, cântăriți-o pe o cântar precis.

Fig.4
În acele zile era o fantezie, iar omul de știință visa doar la posibilitatea de a doza efecte asupra hardware-ului viitorului. În prezent, visele marelui predictor pot fi realizate prin apelarea la robotica inteligentă adaptivă avansată. Problema medicinei, în primul rând, este dezvoltarea conceptului de N.V. Zabludovsky despre o nouă abordare a culturii fizice umane care implică nu numai mișcări voliționale și pasive, ci și masaj. Masajul poate avea atât funcția de relaxare, cât și de mobilizare. În combinarea optimă a acestor funcții, cultura fizică poate contribui la păstrarea și creșterea rezervelor de sănătate și la creșterea eficienței muncii fizice și psihice într-o mai mare măsură.
Prin urmare, esența conceptului de dezvoltare și implementare a roboților în VM pentru oameni sănătoși este utilizarea roboților adaptativi și inteligenți în combinație cu alte tipuri de terapii: aroma-, melo-, psihoterapie pentru a menține creșterea rezervelor de sănătate ale oamenilor, spori performantele acestora.
Desigur, un sistem robotizat este un instrument automatizat, doar temporar lucrând automat, supunându-se unei persoane la nivelul luării de decizii complexe și fiind un rezonabil, și nu doar un asistent fizic.
În conformitate cu clasificarea propusă mai sus, a fost efectuată o revizuire a stării roboticii pentru medicina restaurativă în trei domenii: manipulări asupra articulațiilor sau mișcări ale membrelor în articulații; manipulări asupra țesuturilor moi, de ex. diverse masaje; proteze active si biocontrolate.
3. Roboți pentru efectuarea mișcărilor membrelor în articulații
Mișcările membrelor în articulații de către mâinile medicului sunt utilizate pe scară largă în sport, medicina restaurativă, în tratamentul și educarea pacienților cu consecințele unui accident vascular cerebral, paralizie cerebrală. Mișcările pasive și active ale membrelor în articulații sunt adesea efectuate împreună cu masaj, inclusiv în scopuri recreative. Mecanoterapia înlocuiește mâinile medicului cu mâinile manipulatoare. Una dintre primele lucrări în care a fost propus un robot de manipulare cu șase pentru masaj și mișcarea membrelor în articulații a apărut în 1997. . Mai târziu, apar roboți cu un singur drive de la compania americană „Biodex”, compania elvețiană „Con-Trex” și un robot cu patru unități de la compania elvețiană „Lokomat”.
Robotul companiei elvețiane „Lokomat” este cel mai proeminent reprezentant al subclasei de roboți de reabilitare pentru efectuarea mișcărilor membrelor în articulațiile șoldului, genunchiului și gleznei. Există conceptul de neuroplasticitate, care presupune „stabilirea sarcinii învățării specifice” și constă în faptul că cu ajutorul antrenamentului repetat în mod repetat este posibilă îmbunătățirea activității motorii zilnice la pacienții cu tulburări neurologice. Terapia robotică pe complexul Lokomat îndeplinește cerințele de mai sus și face posibilă efectuarea terapiei locomotorii intensive cu feedback. Vederea generală a complexului este prezentată în fig. 5.

Orez. 5
Lokomat este format din patru actionari pentru impunerea miscarilor de mers si un sistem de descarcare a greutatii pacientului si o banda de alergare.
Pacienții aflați într-un scaun cu rotile pot să nu aibă mult
manopera sunt transferate pe panza benzii de alergare si fixate cu ajutorul unor cleme speciale. Unitățile controlate de computer sunt sincronizate cu viteza benzii de alergare. Ele conferă picioarelor pacientului o traiectorie de mișcare care formează o mers aproape naturală.
Motivarea îmbunătățită a pacientului este realizată prin controlul sarcinii folosind biofeedback în timp ce se afișează starea curentă pe monitor (Fig. 6).

Orez. 6
Pentru sarcinile de ortopedie (adulți și copii), medicină sportivă, reabilitare industrială, prevenire și tratare a osteoartritei, robotul companiei americane „Biodex” este cunoscut. Principiul de funcționare se bazează pe dinamometria electronică. Sistemul asigură diagnosticarea, tratamentul și documentarea rapidă și precisă a tulburărilor care cauzează tulburări funcționale ale mușchilor și articulațiilor. Sistemul permite mobilizarea articulațiilor în direcția de flexie/extensie, abducție/aducție și rotație, ceea ce este necesar pentru restabilirea completă a funcțiilor pierdute.
Pachetul include un set de dispozitive pentru lucrul cu articulațiile șoldului, genunchiului, umărului și cotului, precum și cu glezna și încheietura mâinii. O vedere generală a sistemului care lucrează cu membrele superioare și inferioare este prezentată în fig. 7.

Orez. 7
Roboții pentru reabilitarea membrelor superioare și inferioare au fost prezentați la Simpozionul de robotică medicală din Pennsylvania. În stânga în Fig. 8: GENTLE /s manipulator, dezvoltat de Universitatea din Reading, Marea Britanie; centru: manipulator ARMguide, dezvoltat de Institutul de Reabilitare din Chicago; dreapta: Manipulandum manipulator, dezvoltat de Institutul de Reabilitare din Chicago.

Fig. 8 Manipulatoare pentru refacerea membrelor superioare
În Fig. 9, stânga sus: robot AutoAmbulator, dezvoltat de HealthSouth, SUA; dreapta sus: simulator de mers pe jos, dezvoltat de Universitatea din California, SUA); stânga jos: robot GaitMaster 2 dezvoltat de Universitatea din Tsukuba, Japonia); dreapta jos: un robot pentru mișcările membrelor, precum și pentru masaj, dezvoltat de Academia Rusă de Științe) descris în detaliu mai jos.

Fig. 9 Roboti pentru refacerea articulatiilor extremitatilor inferioare
Impacturile cu ajutorul roboților discutați mai sus sunt denumite mecanoterapie. Mecanoterapia este o metodă de kinetoterapie bazată pe efectuarea de mișcări dozate (în principal pentru segmente individuale ale membrelor) efectuate cu ajutorul unor aparate speciale. Mecanoterapia este utilizată ca tratament reparator pentru diverse tulburări de mișcare, atunci când este necesară creșterea amplitudinii de mișcare a articulațiilor și a forței anumitor grupe musculare. Pe unele dispozitive, puteți practica imediat după operație. Alegerea mișcărilor efectuate pe dispozitivele mecanoterapeutice este determinată de natura restricției mișcărilor și de caracteristicile anatomice ale articulației.
Roboți de manipulare a țesuturilor moi (roboți de masaj)
Istoricul apariției roboților în VM pentru masaj este următorul. În 1997, la cel de-al doilea forum IARP despre robotică medicală, a fost prezentată o singură lucrare care folosește robotica pentru medicina restaurativă - un robot pentru masaj. În 2002, robotul de masaj Tickle, o insectă care gâdilă, a apărut pe site-ul unei companii olandeze. În 2003, a apărut un brevet rusesc - un robot pentru masajul penelor. În 2005, un site web din Silicon Valley a raportat despre utilizarea unui robot Puma pentru masaj. Ideea prezentată în lucrarea rusă a fost luată ca bază pentru acest robot. Din păcate, evoluția acestei dezvoltări este necunoscută. Lucrările enumerate mai sus reprezintă majoritatea roboților de masaj cunoscuți, în afară de numeroasele feronerie de masaj.
O varietate de hardware a fost folosită de mult timp pentru a facilita munca unui terapeut de masaj, pentru a preveni bolile profesionale ale mâinilor sale. Cele mai simple dintre ele: vibratoarele, rolele, duzele pentru acupunctura si presopunctura sunt mijloacele de mecanizare pe care le misca masajul (Fig. 10).


Fig.10. Hardware pentru medicină restaurativă
Trebuie remarcat faptul că robotul poate fi un purtător al hardware-ului menționat.
Mai complexe sunt instrumentele de automatizare, cum ar fi scaunele de masaj. Scaunele de masaj (Fig. 11) ca dispozitive de acționare au perne de aer cu presiune reglabilă, role cu forțe de presare controlate. Zone de impact pentru masaj: gât și umăr, spate, lombar, fese, coapse, picioare, picioare. Tipuri de masaj: frământare, bătut, batere, vibrație, Shiatsu. Din panoul de control, puteți seta nivelul dorit de intensitate a masajului.

Fig.11
Hardware-ul de masaj semi-automat este popular, descarcând parțial terapeutul de masaj. Figura 12 prezintă o mână realizată de compania americană Meilis, care ajută la efectuarea tehnicilor de presare.
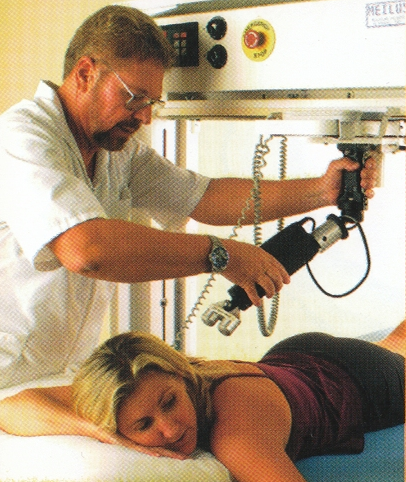
Fig.12
Robotul companiei olandeze Tickle are un design foarte simplu (Fig. 13). Carcasa metalica contine doua motoare electrice, o baterie reincarcabila si patru senzori care iti permit sa monitorizezi panta suprafetei pe care se misca terapeutul de masaj. Mișcarea se realizează cu ajutorul a două „omizi” din silicon, acoperite cu proeminențe care creează un efect de masaj. Principiul mișcării robotului seamănă cu principiul mișcării rezervorului: fiecare dintre motoare își antrenează propria omidă. Efectele robotului sunt mângâierea și gâdilatul, provocând un efect de relaxare.

Fig.13
Robotul de masaj cu penaj efectuează mângâieri plane, continue, rectilinii pe suprafețe mari ale corpului (spate, piept, abdomen, membre). Acest tip de mângâiere superficială se distinge prin mișcări deosebit de blânde și ușoare, care au un efect calmant asupra sistemului nervos, provoacă relaxarea mușchilor și îmbunătățesc circulația sângelui. Designul robotului este un cărucior cu un motor electric care se deplasează de-a lungul unei traverse de-a lungul corpului pacientului (Fig. 14). Traversa este profilată în funcție de relieful suprafeței din spate a pacientului nominal și nu poate fi reprogramată. Periile de mângâiat atârnă de cărucior și sunt presate pe pacient cu plăci elastice.

Fig.14
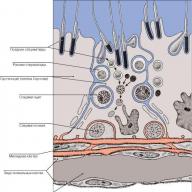
În 2007, în Japonia a fost dezvoltat un robot de masaj facial WAO-1 (Waseda Asahi Oral Rehabilitation Robot 1). Robotul (Fig. 15) este echipat cu două brațe mecanice de 50 cm care masează fața pacientului din ambele părți. Siguranta este asigurata de un sistem restrictiv silometric care impinge bratele robotului in lateral, de indata ce aplica prea multa forta.
Masajul facial este recunoscut ca o modalitate foarte eficientă de combatere a gurii uscate, deoarece stimulează salivația suplimentară și, de asemenea, ajută la corectarea tulburărilor de structură bucală.

Orez. 15
Eficacitatea hardware-ului de masaj este determinată de adecvarea contactului mecanic cu pacientul. Acest contact se face prin instrumentul hardware. Prin urmare, în tehnicile care reproduc mâinile umane, instrumentul trebuie să imite proprietățile de contact ale mâinii umane: elasticitate, căldură, umiditate, proprietăți de frecare (rugozitate, finețe, alunecare), capacități de coordonare (multi-degete, capacitate de prindere). Într-o măsură mai mare, proprietățile enumerate pot fi furnizate de un robot de manipulare cu mai multe articulații.
La Universitatea Industrială de Stat din Moscova, un robot a fost dezvoltat pentru a efectua tehnici de masaj și mișcarea membrelor în articulații. Baza acestui robot este robotul industrial RM-01, al cărui braț de manipulare este antropomorf ca mărime și cinematică (Fig. 16). În contact cu corpul, robotul dezvoltă o forță de până la 60 N. Forțele necesare sunt dezvoltate și controlate de un sistem de control poziție-forță care extinde capacitățile unui robot obișnuit.

Fig.16
Un robot cu șase unități cu datele specificate poate efectua multe manipulări binecunoscute direct pe țesuturile moi, de exemplu. o varietate de masaj, precum și manipulări asupra articulațiilor sub formă de mișcări pasive și active ale membrelor, relaxare post-izometrică sub formă de combinații de încărcare și descărcare a mușchilor membrelor. În Fig. 17, robotul efectuează strângerea mușchilor lungi ai spatelui fetei.
Fig.17
Proteze active bioghidate ale membrelor superioare și inferioare
Bioprotezele pentru membrele superioare și inferioare pierdute ca urmare a unei răni sau boli se bazează pe soluții mai simple. Unele dintre cele mai simple soluții, într-o oarecare măsură, redau aspectul membrelor doar din punct de vedere estetic, alte soluții redau unele funcții. În figura 18 este prezentată clasificarea protezelor, care evidențiază clasele de proteze active și biocontrolate.

Fig.18
Proiectate pe baza teoriei sinergiilor balistice, protezele membrelor inferioare nu sunt active și nu folosesc biosemnale, dar folosesc eficient rezistența elastică a protezelor.
La protezele de tracțiune ale membrelor superioare, inițial pasive, mișcările de prindere a mâinii au fost cauzate de mișcări suplimentare ale părții rămase a brațului sau de mișcarea trunchiului. La început, tijele flexibile au fost veriga de transmisie, ulterior au apărut protezele de tracțiune activă, în care mișcările tijelor erau reproduse prin motoare încorporate.
Active, dar nu biocontrolate, sunt protezele miotonice, la care semnalele de control sunt eforturile persoanei cu handicap. Senzorii sub formă de microîntrerupătoare sau detensometre măsoară aceste forțe și le transmit dispozitivelor de acționare ale mâinii.
Metodele considerate de protezare fără utilizarea biosemnalelor au o serie de dezavantaje. Tijele de control împovărează persoana cu dizabilități, îngreunează deplasarea centurii scapulare, numărul comenzilor de control, la fel ca și în cazul controlului miotonic, este limitat (una sau două comenzi). Interferențele pentru control sunt șocuri externe aleatorii în manșonul ciotului protezei. Cu toate acestea, cele mai simple proteze sunt proiectate ca structuri modulare și sunt produse în serie.
Dezvoltarea protezelor biocontrolate a fost facilitată de progresele în electrofiziologie, biomecanică, microelectronică și sisteme de control cu feedback adaptiv.
În prezent, este cunoscută compania germană „Otto Bock”, care produce în masă proteze pasive și active. Figura 19 prezintă o proteză activă de genunchi.

Fig.19
Cele mai semnificative rezultate în bioprotetice în Rusia în anii 70-80 sunt cunoscute din activitatea Institutului Central de Cercetare al PP. În lucrările TsNIIPP, a luat naștere o direcție fundamental nouă în protezarea membrelor - crearea de proteze cu un sistem de control bioelectric sau proteze biocontrolate. Esența noului principiu de construire a membrelor artificiale este că controlul surselor externe de energie, datorită cărora proteza funcționează, este practic similar cu coordonarea naturală a mișcărilor unei persoane sănătoase.
Într-un organism viu, acțiunile de control sunt transmise mușchilor prin impulsuri bioelectrice care reflectă comenzile sistemului nervos central. În mod similar, într-o proteză de mână controlată bioelectric, rolul semnalelor de comandă este jucat de biocurenții deviați de la mușchii trunchiați ai ciotului. Mecanismul care execută comenzile este o mână artificială, echipată cu o unitate electrică de dimensiuni reduse cu alimentare autonomă.
Pe baza materialelor simpozionului din Pennsylvania din 2004, sunt cunoscute proteze active și exoschelete, prezentate în Fig.20.

Fig. 20 Proteze active și exoschelete
Una dintre primele lucrări în domeniul protezelor active și exoscheletelor sunt lucrările lui Miomir Vukobratovic. Sub conducerea sa au fost dezvoltate exoschelete, într-o versiune cu electrice, în cealaltă cu antrenări pneumatice ale articulațiilor șoldului, genunchiului și gleznei pentru ambele picioare ale pacientului (Fig. 21). Exoscheletul a fost destinat să întărească mușchii slabi din punct de vedere distrofic ai extremităților inferioare umane în timpul mersului.

Fig.21
Compania japoneză Matsushita a dezvoltat un costum robotic care va ajuta la reabilitarea persoanelor parțial paralizate (Fig. 22). Când o persoană cu paralizie la un braț face o mișcare cu brațul său sănătos, brațul paralizat face aceeași mișcare, tensionând și flectând compresoarele care acționează ca musculatură. Imitând mișcarea unui braț sănătos, o persoană într-un costum robotizat își poate antrena brațul bolnav până când funcționarea normală a membrului este restabilită.

Fig.22
Costumul cântărește 1,8 kg. A fost dezvoltat în comun de
Costumul a fost testat într-un spital și urmează să fie comercializat. Costul aproximativ al unui costum pentru utilizarea în clinicile de reabilitare este de 17.000 USD, iar pentru uz casnic, aproximativ 2.000 USD.
O altă companie din Tokyo, Cyberdine, a dezvoltat un costum automat HAL (Hybrid Assistive Limb) (Figura 23) care ajută persoanele în vârstă și persoanele cu dizabilități de mers. Dispozitivul cu senzor va fi disponibil în Japonia pentru o închiriere lunară de 2.200 USD. Un sistem computerizat cu baterie de 22 de lire este atașat de talie. Acesta operează unități de antrenare care sunt legate de șolduri și genunchi și oferă asistență automată la mers.

Fig.23
concluzii
1. Judecând după publicațiile organizațiilor de dezvoltare și centrelor medicale, domeniile de aplicare a roboților medicali, inclusiv pentru medicina restaurativă, se extind, iar cererea pentru aceștia este în creștere.
2. Roboții medicali în comparație cu alte hardware au o serie de avantaje. Acestea sunt reprogramabilitate rapidă, precizie ridicată a repetarii mișcărilor, neobosit, absența factorilor subiectivi (conștiință), interfață prietenoasă (contact psiho-emoțional), parteneriat (pentru copii, implicare în jocuri, în diverse mișcări, de exemplu, în exercițiile de dimineață). ). De asemenea, adaptarea la caracteristicile individuale ale unei persoane (controlul forței poziționale), prezența inteligenței (acumulare de experiență, analiză, generare de programe), securitate sporită datorită adaptării și inteligenței.
3. În comparație cu mâinile unui medic, roboții medicali din ziua de azi sunt adesea inferiori ca sensibilitate și coordonare în mișcările complexe.
4. Conceptul de dezvoltare și implementare a roboților în VM-uri pentru oameni sănătoși este de a folosi roboți adaptabili și inteligenți pentru a menține și a crește starea de sănătate a populației, a restabili capacitatea de muncă a lucrătorilor.
5. La dezvoltarea și implementarea roboților în VM, ar trebui făcut un compromis între roboții multifuncționali și cei economici specializați cu un număr mic de unități.
6. Pentru hardware-ul VM dezvoltat, inclusiv roboții care manipulează țesuturile moi și articulațiile, protezele active și biocontrolate, informațiile tactile și silometrice sunt utilizate în mod eficient atât pentru sistemele de control al forței în buclă deschisă, cât și în buclă închisă și poziție-forță.
7.Bioinformația este utilizată direct ca semnale de control, formează sisteme închise sau formează feedback biologic prin viziune și sistemul nervos uman.
Bibliografie
Golovin V.F. Probleme de dezvoltare a roboticii în medicina restaurativă. Actele conferinței „Mecatronică”, Sankt Petersburg, 2008
Savrasov G.V. Robotică medicală: stare, probleme și principii generale de proiectare. // Buletinul MSTU im. Bauman N.E. Număr special „Echipamente și tehnologie biomedicală”, seria „Fabricarea instrumentelor”, 1998
Razumov A.N., Golovin V.F. Masajul ca cultură a vieții de zi cu zi a oamenilor sănătoși, Buletinul de Medicină Sănătate, M.: 2010, Nr. 6
Razumov A.N. Sănătatea unei persoane sănătoase. - M. „Medicina”, 2007
Razumov A.N., Ponomarenko V.A., Piskunov V.A. Sănătatea unei persoane sănătoase. M.: Medicină, 1996
Dubrovsky V.I., Valeologie. Stil de viata sanatos. – M.: Retorika-A, 2001.
Razumov A.N., Pokrovsky V.I. Sănătatea unei persoane sănătoase, fundamente științifice ale medicinei restaurative, M .: RAMS RRC VMK, 2007
Zabludovsky V.I., teza „Materiale privind problema efectului masajului asupra oamenilor sănătoși” - Sankt Petersburg: 1882
Golovin V.F. Robot pentru masaj. Proceedings of JARP 2nd Workshop on Medical Robotics Heidelberg, Germany, 1997
Sistemul Biodex 3. Manual, 20 Ramsay Road, Shirley, New York 11967-4704
Kovrazhkina E.A., Rumyantseva N.A., Staritsyn A.N., Suvorov A.Yu., Ivanova G.E., Skvortsova V.I. Simulatoare mecanice robotizate în restabilirea funcției de mers la pacienții cu AVC. // M.: Rasmirbi, nr. 1 (24) 2008, p. 11-16.
Tehnologii de asistență. Proceedings IARP, Atelier de robotică medicală. Hidden Valley, Pennsylvania, SUA, 2004
Robotică de reabilitare, Proceedings IARP, Atelier de robotică medicală. Hidden Valley, Pennsylvania, SUA, 2004
Mansurov O.I., Mansurov I.Ya. O metodă de masaj a suprafeței hardware și un robot pentru masaj-penă care implementează această metodă. Brevet Ros Nr 2005130736/14 din 05.10.2005
Jones, Kenny C., Du, Winncy, „Dezvoltarea unui robot de masaj pentru terapie medicală”, Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM'03), 23-26 iulie 2003, Kobe, Japonia, pp. . 1096-1101
Golovin V.F., Grib A.N. Sistem mecatronic pentru terapie manuală și masaj. Proc. A 8-a Conferință Internațională a Forumului Mehatronic, Universitatea din Twente, Țările de Jos, 2002
Golovin V.F. Robot pentru masaj si mobilizare. Actele atelierului AMETMAS-NoE, Moscova, Rusia, 1998
Golovin V.F., Grib A.N. Robot asistat de calculator pentru masaj si mobilizare. Proc. „Computer Science and Information Technologies”, Conferința Greece University of Patras, 2002
Golovin V.F., Samorukov A.E. Metoda de masaj și dispozitivul de implementare a acestuia. Ros. brevet nr. 2145833, 1998
Golovin V.F. Sistem mecatronic pentru manipularea țesuturilor moi. / Mecatronică, automatizare, control. - M.: 2002, nr 7
Pitkin M.R. Biomecanica construirii protezelor membrelor inferioare.Sankt Petersburg: Editura Man and Health, 2006.-131p.
Proiectări de produse protetice și ortopedice. Ed. Kuzhekina A.P. M. „Industria ușoară și alimentară”, 1984
Yakobson Ya. S., Moreinis I. Sh., Kuzhekin A.P. Design de produse protetice și ortopedice / Editat de A.P. Kuzhekin. M., : Industria ușoară și alimentară, 1984
Vukobratovich M. Mersul și mecanismele antropomorfe. Editura „Mir”, M. 1976
A doua jumătate a secolului al XX-lea a fost o perioadă de dezvoltare intensivă în toate domeniile științei, tehnologiei, electronicii și roboticii. Medicina a devenit unul dintre principalii vectori pentru introducerea roboților și a inteligenței artificiale. Scopul principal al dezvoltării roboticii medicale este acuratețea ridicată și calitatea serviciilor, creșterea eficacității tratamentului și reducerea riscului de afectare a sănătății umane. Prin urmare, în acest articol ne vom uita la noi metode de tratament, precum și la utilizarea roboților și a sistemelor automate în diverse domenii ale medicinei.
Pe la mijlocul anilor '70, în spitalul din Fairfax, SUA, Virginia, a apărut primul robot medical mobil ASM, care transporta containere cu tăvi pentru a hrăni pacienții. În 1985, pentru prima dată, lumea a văzut sistemul chirurgical robotizat PUMA 650, conceput special pentru neurochirurgie. Puțin mai târziu, chirurgii au primit un nou manipulator PROBOT, iar în 1992 a apărut sistemul RoboDoc, care a fost folosit în ortopedie pentru protezarea articulară. Un an mai târziu, Computer Motion Inc. a introdus brațul automat Aesop pentru ținerea și repoziționarea unei camere video în timpul procedurilor laparoscopice. Și în 1998, același producător a creat un sistem ZEUS mai avansat. Ambele sisteme nu erau complet autonome, sarcina lor era să asiste medicii în timpul intervenției chirurgicale. La sfârșitul anilor 90, compania de dezvoltare Intuitive Surgical Inc a creat un sistem chirurgical robotic universal telecomandat - Da Vinci, care este îmbunătățit în fiecare an și este implementat în multe centre medicale lumea de până acum.
Clasificarea roboților medicali:
În prezent, roboții joacă un rol important în dezvoltarea medicinei moderne. Ele contribuie la lucrul precis în timpul operațiunilor, ajută la diagnosticarea și la efectuarea diagnosticului corect. Ele înlocuiesc membrele și organele lipsă, restaurează și îmbunătățesc capacitățile fizice ale unei persoane, reduc timpul de spitalizare, oferă confort, receptivitate și confort și economisesc costurile financiare pentru întreținere.
Există mai multe tipuri de roboți medicali care diferă în funcție de funcționalitate și design, precum și în domeniul de aplicare a diferitelor domenii ale medicinei:
Chirurgi robotici și sisteme chirurgicale robotizate- folosit pentru operatii chirurgicale complexe. Nu sunt aparate autonome, ci un instrument controlat de la distanță care oferă medicului precizie, dexteritate și controlabilitate sporite, rezistență mecanică suplimentară, reduce oboseala chirurgului și reduce riscul de hepatită, HIV și alte boli pentru echipa chirurgicală.
Roboti de simulare a pacientului- concepute pentru a dezvolta abilități de luare a deciziilor și intervenții medicale practice în tratamentul patologiilor. Astfel de dispozitive reproduc pe deplin fiziologia umană, simulează scenarii clinice, răspund la administrarea de medicamente, analizează acțiunile cursanților și răspund în mod corespunzător la stimulii clinici.
Exoschelete și proteze robotizate- exoscheletele cresc forta fizica si ajuta la procesul de recuperare a sistemului musculo-scheletic. Proteze robotizate - implanturi care înlocuiesc membrele lipsă, constau din elemente mecanice și electrice, microcontrolere cu inteligență artificială și sunt, de asemenea, capabile să fie controlate de la terminațiile nervoase umane.
Roboți pentru instituții medicale și roboți asistenți- sunt o alternativă la infirmiere, asistente și asistente, asistente, bone și alt personal medical, sunt capabile să acorde îngrijire și atenție pacientului, să ajute la reabilitare, să asigure o comunicare constantă cu medicul curant și să transporte pacientul.
Nanoboți- microroboți care funcționează în corpul uman la nivel molecular. Dezvoltat pentru diagnosticul și tratamentul cancerului, cercetare vase de sângeși repararea celulelor deteriorate, acestea pot analiza structura ADN-ului, o pot corecta, distruge bacteriile și virușii etc.
Alți roboți medicali specializați- există un număr mare de roboți care ajută într-un anumit proces de tratare a unei persoane. De exemplu, dispozitivele care pot muta automat, dezinfectează și cuarțează camerele de spital, măsoară pulsul, prelevează sânge pentru analiză, produc și distribuie medicamente etc.
Să luăm în considerare mai detaliat fiecare tip de roboți folosind exemple de dispozitive automate moderne dezvoltate și implementate în multe domenii ale medicinei.
Chirurgi roboti și sisteme chirurgicale robotizate:
Cel mai faimos chirurg robot din lume este Da Vinci. Aparatul, fabricat de Intuitive Surgical, cântărește o jumătate de tonă și este format din două blocuri, unul este o unitate de control concepută pentru operator, iar al doilea este o mașină cu patru brațe care acționează ca un chirurg. Manipulatorul artificial pentru încheietura mâinii are șapte grade de libertate, similară cu o mână umană, și un sistem de imagini 3D care afișează o imagine tridimensională pe un monitor. Acest design mărește acuratețea mișcărilor chirurgului, elimină tremurul mâinilor, mișcările incomode, reduce lungimea inciziilor și pierderile de sânge în timpul operației.
Robotul chirurg Da Vinci
Cu ajutorul robotului, este posibil să se efectueze un număr mare de operații diferite, cum ar fi repararea valvei mitrale, revascularizarea miocardului, ablația țesuturilor cardiace, instalarea unui stimulator epicardic pentru resincronizare biventriculară, chirurgie tiroidiană, bypass gastric, fundoplicație Nissen. , histerectomie si miomectomie, operatii la coloana vertebrala, inlocuire de disc, timectomie - interventie chirurgicala de extirpare a timusului, lobectomie pulmonara, chirurgie urologica, esofagectomie, rezectie tumora mediastinala, prostatectomie radicala, pieloplastie, extirpare Vezica urinara, ligatura și decuplarea trompelor, nefrectomia radicală și rezecția rinichilor, reimplantarea ureterului și altele.
În prezent, s-a desfășurat lupta pentru piața roboților medicali și a sistemelor chirurgicale automate. Oamenii de știință și companiile de dispozitive medicale sunt dornici să-și introducă dispozitivele, așa că în fiecare an apar tot mai multe dispozitive robotizate.
Concurenții lui Da Vinci includ un nou robot chirurgical MiroSurge conceput pentru chirurgia cardiacă, un braț robotizat de la UPM pentru inserarea precisă a ace, catetere și alte instrumente chirurgicale în procedurile chirurgicale minim invazive, o platformă chirurgicală numită IGAR de la CSII, un sistem robotizat - Sensei X cateter, fabricat de Hansen Medical Inc pentru operații complexe pe inimă, sistem ARTAS de transplant de păr de la Restoration Robotics, sistem chirurgical Mazor Renaissance, care ajută la efectuarea operațiilor la coloana vertebrală și creier, robot chirurg de la oamenii de știință de la SSSA Biorobotics Institute, precum și un robot asistent pentru urmărirea instrumentelor chirurgicale de la GE Global Research, care este în curs de dezvoltare, și multe altele. Sistemele chirurgicale robotizate servesc ca asistenți sau asistenți ai medicilor și nu sunt dispozitive complet autonome.

Robotul chirurg MiroSurge

Robot chirurg de la UPM

Robot chirurg IGAR

Cateter robot Sensei X

Sistem robotizat de transplant de păr ARTAS

Robotul chirurg Mazor Renaissance

Robot chirurg de la Institutul de Biorobotică SSSA

Robot de urmărire a instrumentelor chirurgicale de la GE Global Research
Roboti de simulare a pacientului:
Pentru a dezvolta abilitățile practice ale viitorilor medici, există roboți manichini speciali care reproduc caracteristicile funcționale ale sistemelor cardiovasculare, respiratorii, excretoare și, de asemenea, răspund involuntar la diferite acțiuni ale studenților, de exemplu, atunci când administrează medicamente farmacologice. Cel mai popular simulator de pacient robot este HPS (Human Patient Simulator) de la compania americană METI. Puteți conecta un monitor de lângă pat și monitoriza tensiunea arterială, debitul cardiac, ECG și temperatura corpului. Dispozitivul este capabil să consume oxigen și să elibereze dioxid de carbon, la fel ca și respirația reală. Protoxidul de azot poate fi absorbit sau eliberat în timpul modului de anestezie. Această funcție oferă antrenament în ventilația artificială a plămânilor. Pupilele din ochii robotului sunt capabile să reacționeze la lumină, iar pleoapele mobile se închid sau se deschid, în funcție de faptul că pacientul este conștient. Pe arterele carotide, brahiale, femurale, poplitee radiale se simte un puls, care se modifica automat si depinde de tensiunea arteriala.
Simulatorul HPS are 30 de profiluri de pacienți cu diverse date fiziologice, simulând un bărbat sănătos, o femeie însărcinată, o persoană în vârstă și așa mai departe. În timpul procesului de instruire, este modelat un scenariu clinic specific, care descrie scena și starea pacientului, obiectivele, echipamentul și medicamentele necesare. Robotul are o bibliotecă farmacologică de 50 de medicamente, inclusiv anestezice gazoase și medicamente intravenoase. Manechinul este controlat de un computer wireless, permițând instructorului să controleze toate aspectele procesului de antrenament chiar lângă elev.
De remarcat este marea popularitate a simulatoarelor de naștere precum GD/F55. Este conceput pentru a pregăti personalul medical din secțiile de obstetrică și ginecologie, vă permite să dezvoltați abilități și abilități practice în ginecologie, obstetrică, neontologie, pediatrie, terapie intensivă și ingrijire medicalaîn maternitate. Robotul Simroid imită un pacient pe scaunul unui stomatolog, cavitatea sa bucală o repetă exact pe cea umană. Dispozitivul este capabil să simuleze sunetele și gemetele pe care le creează o persoană dacă suferă. Există simulatoare robotizate pentru predarea tehnicilor de manipulare. Acesta este, de fapt, un model al unei persoane cu simulatoare de vene și vase de sânge din tuburi elastice. Pe un astfel de dispozitiv, elevii își desfășoară abilitățile de venesecție, cateterizare, puncție venoasă.
Exoschelete și proteze robotizate:
Unul dintre cele mai cunoscute dispozitive medicale este costumul robotic - exoscheletul. Ajută persoanele cu dizabilități fizice să-și miște corpul. În momentul în care o persoană încearcă să-și miște brațele sau picioarele, senzorii speciali de pe piele citesc mici modificări ale semnalelor electrice ale corpului, aducând elementele mecanice ale exoscheletului în stare de funcționare. Unele dintre dispozitivele populare sunt Walking Assist Device (un dispozitiv de asistență pentru mers) de la compania japoneză Honda, exoscheletul de reabilitare HAL de la compania Cyberdyne, utilizat pe scară largă în spitalele japoneze, aparatul Parker Hannifin al Universității Vanderbilt (Universitatea Vanderbilt), care face posibilă mișcarea articulațiilor șoldurilor și genunchilor, exoschelet puternic NASA X1 conceput pentru astronauți și persoane paralizate, exoschelet Kickstart de la Cadence Biomedical, care nu funcționează pe baterii, ci folosește energia cinetică generată de o persoană când merge, eLEGS, Esko Rex, exoschelete HULC de la producătorul Ekso Bionics, ReWalk de la ARGO, Mindwalker de la Space Applications Services, ajutând persoanele paralizate, precum și o interfață unică creier-mașină (BMI) sau doar un exoschelet pentru creier MAHI-EXO II pentru a restabili funcțiile motorii prin citirea undelor cerebrale.
Utilizarea pe scară largă a exoscheletelor ajută mulți oameni din întreaga lume să se simtă complet. Chiar și oamenii complet paralizați sunt deja capabili să meargă astăzi. Un exemplu izbitor sunt picioarele robotizate ale fizicianului Amit Goffer, care sunt controlate cu ajutorul cârjelor speciale și pot determina automat când să facă un pas, să recunoască semnalele de vorbire „înainte”, „stau”, „stau în picioare”.

Exoschelet de asistență la mers

Exoscheletul HAL de la Cyberdyne

Exoscheletul Parker Hannifin

Exoschelet NASA X1

Exoscheleton Kickstart de la Cadence Biomedical

Exoschelet HULC de la Ekso Bionics

Exoscheleton ReWalk de la ARGO

Exoschelet Mindwalker de la Space Applications Services 
Exoschelet cerebral MAHI-EXO II

Exoschelet de Amit Goffer
Dar ce să faci când membrele lipsesc? Acest lucru se aplică în principal veteranilor de război, precum și victimelor unor circumstanțe întâmplătoare. În acest sens, companii precum Quantum International Corp (QUAN) și exoprotezele acestora și Agenția pentru Proiecte de Cercetare Avansată a Apărării (DARPA), împreună cu Departamentul de Asistență pentru Veteranți, Centrul de Reabilitare și Serviciul de Dezvoltare al SUA, investesc masiv în cercetare. și dezvoltarea de proteze robotizate (mâini sau picioare bionice) care au inteligență artificială, capabile să simtă mediul înconjurător și să recunoască intențiile utilizatorului. Aceste dispozitive imită cu acuratețe comportamentul membrelor naturale și sunt, de asemenea, controlate de propriul creier (microelectrozii implantați în creier sau senzorii citesc neurosemnale și le transmit ca semnale electrice microcontrolerului). Proprietarul celui mai popular braț bionic în valoare de 15.000 de dolari este britanicul Nigel Ackland, care călătorește prin lume și promovează utilizarea protezelor robotizate artificiale.
Una dintre evoluțiile științifice importante au fost gleznele robotizate artificiale iWalk BiOM, dezvoltate de profesorul MIT Hugh Herr și grupul său de biomecatronică de la MIT Media Lab. iWalk primește finanțare de la Departamentul Afacerilor Veteranilor din SUA și de la Departamentul Apărării, motiv pentru care mulți veterani cu dizabilități care au servit în Irak și Afganistan și-au primit deja gleznele bionice.

Glezne robotizate iWalk BiOM
Oamenii de știință din întreaga lume se străduiesc nu numai să îmbunătățească caracteristicile funcționale ale protezelor robotizate, ci să le ofere un aspect realist. Cercetătorii americani conduși de Zhenan Bao de la Universitatea Stanford din California au creat nanoskin pentru dispozitive medicale protetice. Acest material polimeric are flexibilitate ridicată, rezistență, conductivitate electrică și sensibilitate la presiune (semnale de citire precum panourile tactile).

Nanoskin de la Universitatea Stanford
Roboți pentru instituții medicale și roboți asistenți:
Spitalul viitorului este un spital cu personal uman minim. În fiecare zi, asistentele robotizate, asistentele robotizate și roboții de teleprezență sunt introduși din ce în ce mai mult în instituțiile medicale pentru a contacta medicul curant. De exemplu, roboții asistentă Panasonic, roboții asistenți Robotul de sprijin uman (HSR) de la Toyota, robotul asistent medical irlandez RP7 de la InTouch Health, robotul coreean KIRO-M5 și mulți alții lucrează în Japonia de mult timp. Astfel de dispozitive sunt o platformă pe roți și sunt capabile să măsoare ritmul cardiac, temperatura, să controleze timpul de a mânca și de a lua medicamente, să anunțe în timp util situațiile problematice și acțiunile necesare, să mențină contactul cu personalul medical în viață, să colecteze lucruri împrăștiate sau căzute. , etc.

Infirmieri robotici de la Panasonic

Robot asistent Toyota HSR

Asistenta robot RP7 de la InTouch Health

Robot asistent KIRO-M5
De multe ori, în condiții de îngrijire medicală continuă, medicii nu pot acorda fizic suficientă atenție pacienților, mai ales dacă aceștia se află la mare distanță unul de celălalt. Dezvoltatorii de echipamente medicale robotizate au încercat și au creat roboți de teleprezență (de exemplu, LifeBot 5, sau RP-VITA de la iRobot și InTouch Health). Sistemele automate vă permit să transmiteți semnale audio și video prin 4G, 3G, LTE, WiMAX, Wi-Fi, comunicații prin satelit sau radio, măsurați bătăile inimii pacientului, tensiunea arterială și temperatura corpului. Unele aparate pot efectua electrocardiografie și ultrasunete, au stetoscop și otoscop electronic, se deplasează pe coridoarele și secțiile spitalului, evitând obstacolele. Acești asistenți medicali oferă îngrijire în timp util și procesează datele clinice în timp real.

Robot de teleprezență LifeBot 5

Robot de teleprezență RP-VITA
Pentru transportul în siguranță a probelor, medicamentelor, echipamentelor și rechizitelor în spitale, laboratoare și farmacii, roboții de curierat sunt utilizați cu mare succes. Asistenții au un sistem de navigație modern și senzori la bord care facilitează deplasarea în camere cu un aspect complex. Reprezentanți proeminenți ai unor astfel de dispozitive includ American RoboCouriers de la Adept Technology și Aethon de la University of Maryland Medical Center, Japanese Hospi-R de la Panasonic și Terapio de la Adtex.

Robot de curierat RoboCouriers de la Adept Technology

Robot curier Aethon

Robot curierat Hospi-R de la Panasonic

Robot curier Terapio de la Adtex
O direcție separată în dezvoltarea echipamentelor medicale robotizate este crearea de scaune cu rotile transformatoare, paturi automate și vehicule speciale pentru persoanele cu dizabilități. Reamintim evoluții precum scaunul cu șenile de cauciuc Unimo de la compania japoneză Nano-Optonics, (Institutul de Tehnologie Chiba), sub îndrumarea profesorului asociat Shuro Nakajima (Shuro Nakajima), folosind picioarele roților pentru a depăși scările sau șanțurile, Tek Robotic Mobilization Dispozitiv scaun cu rotile robotizat de la Action Trackchair. Panasonic este gata să rezolve problema transferului unui pacient de pe un scaun pe un pat care necesită mari dimensiuni efort fizic personal medical. Acest dispozitiv se transformă automat din pat în scaun și invers atunci când este nevoie. Murata Manufacturing Co a făcut echipă cu Kowa pentru a realiza un vehicul medical inovator, Electric Walking Assist Car, o bicicletă autonomă cu un sistem de control al pendulului și un giroscop. Această dezvoltare este destinată în principal persoanelor în vârstă și persoanelor care au probleme cu mersul pe jos. Separat, remarcăm o serie de roboți japonezi RoboHelper de la Muscle Actuator Motor Company, care sunt asistenți indispensabili asistentelor în îngrijirea pacienților imobilizați la pat. Dispozitivele sunt capabile să ridice o persoană dintr-un pat într-o poziție șezând sau să ridice deșeurile fizice ale unei persoane culcate, cu excepția folosirii oalelor și a rațelor.
Nanoboți:
Nanoroboții sau nanoboții sunt roboți de dimensiunea unei molecule (mai puțin de 10 nm), capabili să miște, să citească și să proceseze informații, precum și să fie programați și să îndeplinească anumite sarcini. Aceasta este o direcție complet nouă în dezvoltarea roboticii. Sfere de utilizare a unor astfel de dispozitive: diagnosticul precoce al cancerului și livrarea direcționată a medicamentelor către celulele canceroase, instrumente biomedicale, chirurgie, farmacocinetică, monitorizarea pacienților diabetici, producerea unui dispozitiv din molecule individuale conform desenelor sale prin asamblare moleculară prin nanoroboți , utilizarea militară ca mijloc de supraveghere și spionaj, dar și ca armă, cercetare și dezvoltare spațială etc.
În prezent, sunt cunoscute dezvoltările roboților medicali microscopici pentru detectarea și tratarea cancerului de la oamenii de știință sud-coreeni, bioroboți de la oamenii de știință de la Universitatea din Illinois care se pot deplasa singuri în lichide vâscoase și medii biologice, prototipul mării. lamprey este nanorobotul Cyberplasm, care se va mișca în corpul uman, detectând boli într-un stadiu incipient, nanoroboții inginerului Ado Pun, care pot călători prin sistemul circulator, pot livra medicamente, pot face teste și elimina cheaguri de sânge, nanorobotul magnetic Spermbot - Dezvoltarea omului de știință Oliver Schmidt și a colegilor săi de la Institutul pentru Nanoștiințe Integrative din Dresda (Germania) pentru livrarea de spermă și medicamente, nanoboți pentru a înlocui proteinele din organism de la oamenii de știință de la Universitatea din Viena (Universitatea din Viena), împreună cu cercetători de la Universitate of Natural Resources and Life Sciences Vienna (Universitatea de Resurse Naturale și Științe ale Vieții din Viena).


Microroboți Cyberplasm

Ado Puna Nanobots

Nanorobot magnetic Spermbot

Nanoboți pentru înlocuirea proteinelor
Alți roboți medicali specializați:
Există un număr mare de roboți specializați care îndeplinesc sarcini individuale, fără de care este imposibil să ne imaginăm un tratament eficient și de înaltă calitate. Unele dintre aceste dispozitive sunt aparatul robotizat de cuarț Xenex și robotul de dezinfecție TRU-D SmartUVC de la Philips Healthcare. Fără îndoială, astfel de dispozitive sunt pur și simplu asistenți indispensabili în lupta împotriva infecțiilor nosocomiale și a virusurilor, care sunt una dintre cele mai grave probleme din instituțiile medicale.

Aparat robotizat de cuarț Xenex

Robot de dezinfecție Philips Healthcare TRU-D SmartUVC
Recoltarea unei probe de sânge este cea mai comună procedură medicală. Calitatea procedurii depinde de calificările și starea fizică a lucrătorului medical. Adesea, o încercare de a extrage sânge prima dată se termină cu eșec. Prin urmare, pentru a rezolva această problemă, a fost dezvoltat robotul Veebot, care are viziune computerizată, cu ajutorul căruia determină locația venei și ghidează ușor acul acolo.

Robot de colectare a sângelui Veebot
Vomiting Larry Vomiting Robot examinează norovirusurile care cauzează 21 de milioane de boli, inclusiv simptome de greață, diaree apoasă, dureri abdominale, pierderea gustului, letargie generală, slăbiciune, dureri musculare, dureri de cap, tuse, febră scăzută și, desigur, vărsături puternice.

Robot pentru studierea procesului de vărsături Vărsături Larry
Cel mai popular robot pentru copii rămâne PARO - o jucărie pufoasă pentru copii sub formă de focă. Robotul terapeutic își poate mișca capul și labele, recunoaște vocea, intonația, atingerea, măsura temperatura și lumina din cameră. Concurentul său este HugBot, un robot uriaș ursuleț de pluș care măsoară ritmul cardiac și tensiunea arterială.

Robot de terapie PARO

Ursul Robot HugBot
O ramură separată a medicinei care se ocupă cu diagnosticul, tratamentul bolilor, rănilor și tulburărilor la animale este medicina veterinară. Pentru a pregăti specialiști calificați în acest domeniu, Colegiul de Medicină Veterinară în dezvoltarea animalelor de companie robotizate creează roboți unici de dresaj sub formă de câini și pisici. Pentru a aproxima comportamentul exact al unui animal, software-ul este dezvoltat separat la Centrul pentru Sisteme de Calcul Avansate de la Universitatea Cornell (CAC).

Antrenori de roboți sub formă de câini și pisici
Eficacitatea roboților în medicină:
Evident, utilizarea roboților în medicină are o serie de avantaje față de tratamentul tradițional care implică factorul uman. Utilizarea mâinilor mecanice în chirurgie previne multe complicații și erori în timpul operațiilor, reduce perioada de recuperare postoperatorie, reduce riscul de infecție și infecție a pacientului și a personalului, elimină pierderile mari de sânge, reduce durerea și contribuie la un efect cosmetic mai bun ( mici cicatrici și cicatrici). Asistenții medicali robotici și roboții de reabilitare fac posibilă acordarea unei atenții sporite pacientului în timpul tratamentului, controlul procesului de recuperare, limitarea personalului în viață de la munca laborioasă și neplăcută și permite pacientului să se simtă ca o persoană cu drepturi depline. Tratamentele și echipamentele inovatoare ne apropie în fiecare zi de o viață mai sănătoasă, mai sigură și mai lungă.
În fiecare an, piața globală a roboților medicali este completată cu noi dispozitive și, fără îndoială, este în creștere. Potrivit Research and Markets, piața numai pentru roboți de reabilitare, bioproteze și exoschelete va crește la 1,8 miliarde de dolari până în 2020. Principalul boom al roboților medicali este așteptat după adoptarea unui standard unic ISO 13482, care va deveni un set de reguli pentru elementele structurale, materialele și software-ul utilizat în dispozitive.
Concluzie:
Fără îndoială, putem spune că roboții medicali sunt viitorul medicinei. Utilizarea sistemelor automatizate reduce semnificativ erorile medicale și reduce deficitul de personal medical. Nanorobotica ajută la depășirea bolilor grave și la prevenirea complicațiilor într-un stadiu incipient și la utilizarea pe scară largă a nanomedicamentelor eficiente. În următorii 10-15 ani, medicina va atinge un nou nivel prin utilizarea serviciului robotizat. Din păcate, Ucraina se află într-o stare deplorabilă în ceea ce privește această ramură de dezvoltare. De exemplu, în Rusia, în Ekaterinburg, celebrul robot chirurg „Da Vinci” și-a efectuat prima operație în 2007. Și în 2012, președintele Dmitri Anatolyevich Medvedev a instruit Ministerul rus al Sănătății, împreună cu Ministerul Industriei și Comerțului, să rezolve problema dezvoltării de noi tehnologii medicale folosind robotica. Această inițiativă a fost susținută Academia RusăȘtiințe. Realitatea este că în lipsa unui sprijin real din partea autorităților ucrainene în dezvoltarea domeniului roboticii medicale, statul nostru rămâne în urma altor țări civilizate în fiecare an. Din aceasta rezultă un indicator al nivelului de dezvoltare al țării în ansamblu, deoarece grija pentru sănătatea și viața unui cetățean, menționată în legea principală - Constituția Ucrainei, este „cea mai înaltă valoare socială”.
mainstream
O.V. CERCHENKO,
cercetător al instituției științifice pentru bugetul federal de stat „Direcția pentru progres științific și tehnic”, Moscova, Rusia, [email protected]
S.A. ȘEPTUNOV,
Doctor în științe tehnice, director al IKTI RAS, Moscova, Rusia, [email protected]
CHIRURGIE ASISTĂ DE ROBOT ȘI ROBOȚI EXOSCHELET PENTRU REABILITAREA PERSOANELOR CU TULBURĂRI LOCOMOTORII: LIDEREI TEHNOLOGICI MONDIALI ȘI PERSPECTELE RUSIEI
Cercenko O.V., Sheptunov S.A. Roboti de chirurgie asistată de robot și exoschelet pentru reabilitarea persoanelor cu afecțiuni musculo-scheletice: lideri tehnologici mondiali și perspective pentru Rusia (FGBNU „Direcția Progresului Științific și Tehnic”, Moscova, Rusia; IKTI RAS, Moscova, Rusia)
Adnotare. Sunt prezentate rezultatele analizei activității de publicare și brevetare în două dintre cele mai active domenii în dezvoltare ale industriei roboticii medicale: roboți exoschelet pentru reabilitarea persoanelor cu funcții musculo-scheletice afectate, chirurgie asistată de robot. A fost dezvăluită o discrepanță între structura publicării globale și naționale și fluxurile de brevete. Se remarcă deficiențele dezvoltărilor străine în chirurgia asistată de robot, care creează premisele pentru promovarea dezvoltărilor de substituire a importurilor ale inginerilor autohtoni.
Cuvinte cheie Cuvinte cheie: chirurgie robotizată, exoschelete pentru reabilitarea persoanelor cu tulburări musculo-scheletice, lideri tehnologici, competitivitate, analiză scientometrică, analiză de brevete.
© O.V. Cercenko,
S.A. Sheptunov, 2015
Roboții medicali pot fi definiți ca fiind dispozitive electronice-mecanice care îndeplinesc parțial sau complet funcțiile unei persoane sau ale organelor și sistemelor sale individuale în rezolvarea diferitelor probleme medicale. În 1998, Joseph Endelberger, un inginer și antreprenor american care a creat prima companie privată din lume pentru producția de mașini programabile și a primit titlul de „părintele roboticii” pentru aceasta, prezentând robotul asistent HelpMate Trackless Robotic Courier, a declarat că spitalele - acesta este chiar mediul care este ideal pentru utilizarea roboților.
Este cel mai probabil ca roboții să poată crea valoare adăugată nouă în domeniul sănătății prin:
1. reducerea costului forței de muncă prin efectuarea anumitor operațiuni nu de către o persoană, ci prin mijloace robotizate;
2. beneficii sociale și economice prin creșterea independenței și activității sociale a persoanelor care au nevoie de îngrijiri de specialitate;
3. creșterea calității îngrijirii oferite de sistemele robotizate (roboții pot efectua manipulări mai subtile și pot efectua acțiuni repetitive cu un grad mai mare de acuratețe decât oamenii);
4. efectuarea de operații pe care o persoană nu le poate efectua, inclusiv în intervenții chirurgicale, din cauza restricțiilor de dimensiune sau nu-
mainstream
2012 2013 2014 2015 2016 2017 2018 2019 2020 2021 2022 2023 2024 2025
Prognoza cumulativă
Rata de creștere a pieței
Orez. 1. Prognoza pieței globale a sistemelor chirurgicale robotizate (excluzând sistemele pentru radiochirurgie) (Sursa: Wintergreen Research, BCC Research, Global Data)
necesitatea unei acurateţe sporite a operaţiilor efectuate.
Dispozitivele medicale din punct de vedere al valorii ocupă cea mai mare parte a pieței roboților profesioniști de service. Acest segment include complexe chirurgicale robotizate, aparate pentru radioterapie și dispozitive pentru reabilitarea pacientului. Potrivit unei analize analitice realizate de RVC, vânzările de astfel de dispozitive s-au ridicat la 1,45 miliarde de dolari SUA, sau 41% din costul tuturor roboților profesioniști vânduți în 2013, excluzând sistemele militare.
În diverse previziuni, volumul pieței globale a sistemelor robotizate medicale până în 2018 este estimat în intervalul de la 13,6 miliarde dolari până la 18 miliarde dolari, iar până în 2020 este probabil să ajungă la peste 20 miliarde dolari cu o rată anuală de creștere de 12-12,6% .
Se preconizează că roboții chirurgicali vor reprezenta cea mai mare parte a veniturilor.
Conform prognozei combinate a Winter-green Research, BCC Research, Global Data, dimensiunea estimată a pieței sistemelor chirurgicale robotizate (excluzând componentele și consumabilele,
excluzând radiochirurgia) până în 2025 se va ridica la 6,6 miliarde de dolari SUA (Fig. 1).
Un sector separat pe piața generală a echipamentelor medicale va fi piața exoscheletelor, care se așteaptă să crească și mai mult. Potrivit studiului „Roboți de reabilitare: bursa,
strategii și previziuni în întreaga lume din 2015 până în 2021”, din Wintergreen Research, publicat în Research and Markets, dimensiunea pieței roboților și mecanismelor de reabilitare medicală în 2014 a fost de 203,3 milioane USD și se estimează că va atinge un profit de 1 USD până în 2021, 1 miliard USD.
Scopul acestui studiu a fost acela de a determina, pe baza datelor analizelor scientometrice și de brevete multicriteriale, principalele tendințe de dezvoltare științifică și tehnologică a roboticii medicale în lume, precum și evaluarea competitivității rezervelor științifice și tehnologice. și poziția Rusiei pe această piață tehnologică folosind exemplul a două dintre cele mai active domenii ale industriei în dezvoltare:
Roboți exoscheletici pentru reabilitarea persoanelor cu funcții musculo-scheletice afectate;
Chirurgie robotizată.
mainstream
N CO O "O CNCOtJ-LO"ONCOOsO-- schso-^yu OO-OOOOOOOOOOOOOO-- I- I- I- I- I- OsOvOsOOOOOOOOOOOOOO |- |- |- CNCNCNCNCNCNCNCNCNCNCNCNCNCNCN
Orez. 2. Dinamica activității de publicare în direcția „tehnologii de realizare a unui robot-exoschelet pentru reabilitarea persoanelor cu funcții musculo-scheletice afectate”
(conform Web of Science Core Collection din 25 martie 2015)
O analiză a nivelului actual și a tendințelor de dezvoltare a activității de cercetare în zone selectate din lume și din Rusia a fost efectuată folosind una dintre cele mai autorizate surse de informații analitice despre cercetarea științifică cheie din lume - indexul internațional de citare Web of Science Core Colectie.
Pentru a determina potențialul de industrializare al zonelor studiate și competitivitatea restanțelor tehnologice rusești, acest studiu a folosit metodologia autorului de analiză a brevetelor multicriteriale a grupului de lucru condus de N.G. Kurakova, care include o evaluare a dinamicii activității brevetelor în lume în funcție de direcție, o evaluare a distribuției documentelor de brevet în funcție de statutul lor, o evaluare a ponderii cererilor de invenții în comparație cu ponderea brevetelor acordate și alte indicatori. Analiza brevetelor a fost efectuată folosind bazele de date de brevete Orbit și Thomson Innovation.
S-au efectuat analize scientometrice și de brevet pentru perioada 1995-2015.
Tehnologii pentru crearea unui robot-exoschelet pentru reabilitarea persoanelor cu funcții musculo-scheletice afectate
Exoscheletul este un cadru extern care facilitează îndeplinirea funcțiilor musculo-scheletice pentru o persoană. În medicină, acesta este denumirea dispozitivelor pe care persoanele cu dizabilități le-ar putea folosi pentru a oferi mișcare prin sprijin, precum și pentru antrenamentul regulat care vizează restabilirea mobilității pierdute.
Conform indexului internațional Web of Science Core Collection, volumul publicațiilor din acest domeniu științific crește exponențial (Fig. 2).
Primele țări în ceea ce privește numărul de articole din lume sunt SUA, China, Italia. Rusia reprezintă doar 0,1% din fluxul global de publicații.
Există o creștere exponențială a activității de brevetare în domeniul cercetării în lume. Acest lucru este dovedit de analiza noastră efectuată folosind două baze de date de brevete: Orbit (Fig. 3) și Thomson Innovation (Fig. 4).
Se atrage atenţia asupra creşterii numărului de cereri de invenţii, al căror număr depăşeşte numărul de brevete active, ceea ce este un semn al unui mare potenţial de dezvoltare a unei direcţii tehnologice (Fig. 5).
Motorii direcției sunt SUA, China și Republica Coreea - între aceste țări, cel mai probabil, se va derula lupta pentru viitoarele piețe de nișă create de dispozitive cu un astfel de scop funcțional. Datele din baza de date Orbit (Fig. 6) și Thomson Innovation (Fig. 7) vizualizează liderul tehnologic al acestor trei țări în proiectarea analizei brevetelor.
Rusia se află pe locul 11 în ceea ce privește numărul de brevete primite de rezidenții țării, dar ponderea brevetelor naționale este de doar 1% din cea globală în acest domeniu (Fig. 6).
O analiză a distribuției brevetelor de-a lungul anilor a făcut posibilă repararea schimbării liderului tehnologic mondial. După cum rezultă din date,
ECONOMIA ŞTIINŢEI 5015, Vol. 1, Nr. 2
mainstream
Anii de publicare
"OG ^ OOO" O "- C4CJ ^ fl" ONffl> 0 - CN C "E Yu
O"O"O"O^OOOOOOOOOOO--
O"O"O"OvOOOOOOOOOOOOOOOO
-->---CNCN(N Orez. 3. Dinamica activității de brevetare în direcția „tehnologii pentru crearea unui robot-exoschelet pentru reabilitarea persoanelor cu funcții musculo-scheletice afectate” (conform datelor Orbit din 25 martie 2015) Orez. 4. Dinamica activității de brevetare în direcția „tehnologiilor pentru crearea unui robot-exoschelet pentru reabilitarea persoanelor cu funcții musculo-scheletice afectate” (conform Thomson Innovation din 13 aprilie 2015) Orez. Fig. 5. Distribuția documentelor de brevet după statutul juridic în direcția „tehnologii pentru crearea unui robot-exoschelet pentru reabilitarea persoanelor cu funcții musculo-scheletice afectate” (conform datelor Orbit din 25 martie 2015) ECONOMIA ŞTIINŢEI 201 5, Vol. 1, Nr. 2 mainstream Țări prioritare Orez. Fig. 6. Distribuția brevetelor în direcția „tehnologii pentru crearea unui robot-exoschelet pentru reabilitarea persoanelor cu funcții musculo-scheletice afectate” pe țările prioritare (conform datelor Orbit din 25 martie 2015) Orez. 7. Distribuirea brevetelor în direcția „tehnologii pentru crearea unui robot-exoschelet pentru reabilitarea persoanelor cu funcții musculo-scheletice afectate” pe țările prioritare (conform Thomson Innovation din 13 aprilie 2015) prezentate în fig. 8, din 1996, dezvoltatorii din multe țări au luat parte la dezvoltarea tehnologiilor pentru crearea unui robot-exoschelet, aducând contribuții proporționale la industrializarea acestuia. Cu toate acestea, conform Thomson Innovation, în 2012 China iese pe primul loc în numărul total de brevete primite de rezidenții țării. Activitatea de brevetare a tehnologiei coreene a crescut, de asemenea, rapid din 2005 (Fig. 8). Datele de analiză a brevetelor obținute cu ajutorul bazei de date Orbit ne permit să remarcăm același model în schimbarea liderului tehnologic: până în 2006, mai multe țările dezvoltate, în special activitatea de cercetare și invenție a Statelor Unite. Cu toate acestea, din 2006, China a început să crească activitatea de brevetare a soluțiilor tehnice naționale și devine un lider tehnologic mondial evident până în 2012. Republica Coreea a înregistrat și o creștere a activității de brevetare din 2007. Din păcate, restanța științifică și tehnologică a Rusia în perioada 2007-2013 nereflectat și neprotejat de niciun număr semnificativ de brevete (Fig. 9). Dintre brevetele Federației Ruse privind tehnologiile de creare a unui robot-exoschelet, 65% au fost eliberate rezidenților țării, mai mult de o treime din brevetele Federației Ruse au fost primite de nerezidenți (Fig. 10). ECONOMIA ŞTIINŢEI 5015, Vol. 1, Nr. 2 mainstream Orez. Fig. 8. Dinamica activității de brevetare în direcția „tehnologii pentru crearea unui robot-exoschelet pentru reabilitarea persoanelor cu funcții musculo-scheletice afectate” în diferite țări după prioritate (conform Thomson Innovation din 13.04.2015) Orez. Fig. 9. Dinamica activității de brevetare în direcția „tehnologiilor pentru crearea unui robot-exoschelet pentru reabilitarea persoanelor cu funcții musculo-scheletice afectate” în diferite țări după prioritate (conform datelor Orbit din 25 martie 2015) Orez. Fig. 10. Dinamica activității de brevetare a rezidenților Federației Ruse în direcția „tehnologiilor pentru crearea unui robot-exoschelet pentru reabilitarea persoanelor cu funcții musculo-scheletice afectate” (conform datelor Orbit din 25 martie 2015) ECONOMIA ŞTIINŢEI 201 5, Vol. 1, Nr. 2 mainstream tabelul 1 Top 10 deținători de brevete din lume în direcția „tehnologii pentru crearea unui robot-exoschelet pentru reabilitarea persoanelor cu funcții musculo-scheletice afectate” Titularii de brevete Numărul de brevete UNIVERSITATEA ZHEJIANG 40 UNIVERSITATEA SHANGHAI JIAO TONG 25 UNIVERSITATEA DE ȘTIINȚĂ ELECTRONICĂ ȘI TEHNOLOGIE DIN CHINA 18 INSTITUTUL DE TEHNOLOGIE HARBIN 17 UNIVERSITATEA DIN CALIFORNIA 14 UNIVERSITATEA SOGANG FUNDAȚIA DE COOPERARE INDUSTRIE-UNIVERSITARĂ 12 UNIVERSITATEA SUD-VEST JIAOTONG 11 UNIVERSITATEA DE TEHNOLOGIE BEIJING 10 UNIVERSITATEA DIN SHANGHAI PENTRU ȘTIINȚĂ ȘI TEHNOLOGIE 9 Sursa: conform bazei de date Orbit din 25 martie 2015 În tabel. 1 prezintă primii 10 deținători de brevete din lume cu cele mai mari portofolii de brevete în domeniu. Majoritatea brevetelor cu prioritate rusă aparțin Universității de Stat din Moscova, numită după M.V. Lomonosov (45%). Tehnologii de chirurgie robotizată Chirurgia asistată robotic este cea mai recentă realizare în tehnologia laparoscopică și în chirurgia minim invazivă, ceea ce presupune cel mai mic traumatism chirurgical și reducerea durerii la pacient. Există o serie de avantaje ale chirurgiei asistate de robot care sugerează că adoptarea pe scară largă a tehnologiei ar duce chirurgia în general la un nou nivel: O schimbare fundamentală în activitatea chirurgului cu oferirea unei game largi de oportunități; Vizualizare 3D îmbunătățită a structurilor anatomice, în special a fasciculelor neurovasculare; Asigurarea faptului că tinerii specialiști efectuează operațiuni de înaltă calitate după finalizarea unui curs de pregătire de specialitate; Efectuarea de operații de înaltă calitate în acele zone anatomice în care anterior era imposibil să se efectueze intervenția minim invazivă; Absența tremorului, excizia atentă și „bândă” a țesuturilor; Tracțiune și deplasare minimă a organelor învecinate. Activitatea de publicare în domeniul „chirurgiei asistate de robot”, conform Web of Science Core Collection, a crescut constant în ultimii douăzeci de ani (Fig. 11). Liderii publicațiilor sunt SUA, Germania și Japonia, ponderea publicațiilor rusești este de 0,1% din fluxul global (locul 41 în lume). Activitatea de brevetare a soluțiilor tehnologice în zona de cercetare este, de asemenea, în creștere exponențială, conform bazei de date Orbit (Fig. 12) și a bazei de date Thomson Innovation (Fig. 13). Numărul de brevete eliberate anual, începând din 2009, este estimat la două sute ECONOMIA ŞTIINŢEI 5015, Vol. 1, Nr. 2 mainstream 400 -350 -300 -250 -200 - "ONCOO^O"-CNn"fin"ONCOO"O^Wn^iO O"OO-OOOOOOOOOOOO-- O"O"OCNOOOOOOOOOOOOOOOOO CNCNCNCNCNCNCNCMCNCNCNCNCNCNCNCN Orez. 11. Dinamica activității de publicare în direcția „tehnologiilor chirurgiei robotizate” (conform Web of Science Core Collection din 24 martie 2015) iar numărul de depuneri de brevete crește exponențial (Figura 14). Statele Unite ale Americii, Republica Coreea și China ar trebui incluse printre liderii tehnologici în această direcție - acest lucru este dovedit de datele din baza de date Orbit (Fig. 15) și datele de analiză a brevetelor efectuate folosind baza de date Thomson Innovation ( Fig. 16). SUA este listată ca țară prioritară în jumătate din documentele de brevet emise în acest domeniu. Ponderea brevetelor obținute de rezidenții ruși este de doar 1,91% din numărul global de documente de brevet. Cu acest indicator, Federația Rusă ocupă locul 8, însă rămâne în urma Chinei, care ocupă a treia poziție în ratingul portofoliului de brevete, de 6,7 ori în acest indicator (Fig. 15). Orez. Fig. 12. Dinamica activității de brevetare în domeniul „tehnologiilor chirurgiei robotizate” (conform datelor Orbit din 24 martie 2015) Orez. 13. Dinamica activității de brevetare în direcția „tehnologiilor de chirurgie robotizată” (conform Thomson Innovation din 13 aprilie 2015) ECONOMIA ŞTIINŢEI 201 5, Vol. 1, Nr. 2 mainstream ■ Inactiv ■ Aplicaţii ■ Activ US WO KR CN DE EP JP RU GB FR CA IT ES AU UA Țări prioritare Fig.14. Repartizarea documentelor de brevet după statut juridic în domeniul „tehnologiilor chirurgiei robotizate” (conform datelor Orbit din 24 martie 2015) Orez. Fig. 15. Distribuția brevetelor în domeniul „tehnologiilor de chirurgie robotizată” pe țări prioritare (conform datelor Orbit din 24 martie 2015) Orez. Fig. 16. Distribuția brevetelor în domeniul „tehnologiilor de chirurgie robotizată” pe țările prioritare (conform Thomson Innovation din 13 aprilie 2015) ECONOMIA ŞTIINŢEI 5015, Vol. 1, Nr. 2 mainstream Orez. 17. Dinamica activității de brevetare în direcția „tehnologiilor de chirurgie robotizată” în diferite țări după prioritate (conform Thomson Innovation din 13.04.2015) Orez. Fig. 18. Dinamica activității de brevetare în domeniul „tehnologiilor chirurgiei robotizate” în diferite țări după prioritate (conform datelor Orbit din 24.03.2015) RU WO US EP CA IT ES KR DE FR Țări prioritare Orez. Fig. 19. Dinamica activității de brevetare a rezidenților Federației Ruse în domeniul „tehnologiilor chirurgiei asistate de robot” (conform datelor Orbit din 24 martie 2015) ECONOMIA ŞTIINŢEI 201 5, Vol. 1, Nr. 2 mainstream masa 2 Top 10 deținători de brevete din lume în domeniul „tehnologiilor chirurgiei robotizate” Cantitate brevete CHIRURGICALE INTUITIVE 246 ETHICON ENDO CHIRURGIE 45 SAMSUNG ELECTRONICS 39 HANSEN MEDICAL 39 UNIVERSITATEA JOHNS HOPKINS 30 DEUTSCH ZENTR LUFT & RAUMFAHRT 25 UNIVERSITATEA TIANJIN 24 OPERAȚII CHIRURGICALE INTUITIVE 23 Sursa: (conform Orbit din 24 februarie 2015) Potrivit bazei de date Thomson Innovation, Statele Unite și-au menținut conducerea ca țară prioritară din 1995 până în prezent. În Republica Coreea, primele brevete au fost obținute de rezidenți în 2006, rezidenți ai Chinei - în 2003, dar astăzi ambele țări sunt implicate activ în lupta pentru piețele dispozitivelor de chirurgie asistată de robot (Fig. 17). Baza de date Orbit vizualizează aceeași tendință. Cercetătorii americani demonstrează o activitate constantă de brevetare în acest domeniu pe parcursul întregii perioade de observare de douăzeci de ani, iar din 2006, China și Republica Coreea au intrat în lupta pentru conducere. Rusia, din păcate, este o țară prioritară pentru brevetele unice în perioada 2002-2013. (Fig. 18). În total, au fost emise 64 de brevete ale Federației Ruse pentru soluții în domeniul tehnologiilor de chirurgie asistată de robot, dintre care 40 aparțin solicitanților ruși. Distribuția brevetelor rusești pe țări prioritare (Fig. 19) arată că nerezidenții reprezintă 37,5% din brevetele emise în Federația Rusă, majoritatea fiind emise către companii din SUA. În tabel. 2 prezintă primii 10 deținători de brevete din lume în domeniul chirurgiei asistate de robot. Liderul absolut printre ei este compania Intuitive Surgical (SUA), care a devenit dezvoltatorul sistemului Da Vinci. Portofoliul de brevete al companiei a complicat foarte mult dezvoltarea pieței de chirurgie asistată de robot, deoarece a închis soluțiile și elementele fundamentale de proiectare ale robotului chirurgical. Dar, după cum se poate observa din exemplul Chinei și Republicii Coreea, noi soluții tehnologice pot fi încă găsite în condițiile dezvoltării active a tehnologiei cu un monopolist evident. Ethicon Endo Surgery, care ocupă a treia poziție în clasament, a primit 4 brevete ale Federației Ruse. Deținătorii de brevete ruși în domeniul „tehnologiilor chirurgiei robotizate” sunt reprezentați de companii și universități care dețin câte 1-2 brevete. Concluzie Datele prezentate nu ne permit să caracterizăm rezervele științifice și tehnologice ale Federației Ruse în domeniul roboților exoschelet pentru reabilitarea persoanelor cu funcții musculo-scheletice afectate și chirurgia robotizată ca fiind competitive. Din păcate, nu a fost posibil să se găsească brevete ale companiilor de tehnologie autohtone, ceea ce indică disponibilitatea acestora din urmă de a oferi produse de serie nu numai pieței globale, ci și interne. ECONOMIA ŞTIINŢEI 5015, Vol. 1, Nr. 2 mainstream Între timp, ratele de creștere ale piețelor mondiale pentru roboți chirurgicali și roboți exoscheletici pentru reabilitarea persoanelor cu tulburări musculo-scheletice ne permit să le caracterizăm ca noi și în creștere dinamică. Prin urmare, dezvoltatorii ruși au toate șansele să ocupe piețe de nișă. Necesitatea unor noi dezvoltări rusești în chirurgia robotică se datorează și unui număr de deficiențe ale sistemului Da Vinci utilizat în lume: Lipsa senzațiilor tactile a chirurgului; Greutatea și dimensiunea mare a sistemului; Perioada lungă de pregătire pentru intervenție chirurgicală; Lipsa unui sistem de urmărire la țintă (locul patologiei); Un unghi mic de vizualizare (lipsa vederii periferice) pentru operatorul consolei chirurgului; Utilizarea unui mecanism pentru a efectua diferite mișcări; Plasarea prelungită a trocarelor în comparație cu operațiile laparoscopice standard; Lipsa contactului cu pacientul; Lipsa vederii 3D pentru un medic care asistă direct lângă un pacient. Pe lângă direcțiile de mai sus de dezvoltare tehnologică a acestor sisteme, trebuie remarcate în special caracteristicile de cost ale sistemului Da Vinci și instrumentele și accesoriile individuale (costul mediu al unui complex este de 3 milioane de euro). Instruirea personalului pentru a lucra cu sistemul este posibilă numai în străinătate. O mare problemă este suportul tehnic și întreținerea sistemului din Rusia. Toate deficiențele observate creează premise excelente pentru promovarea dezvoltărilor de înlocuire a importurilor ale inginerilor autohtoni, ceea ce înseamnă că includerea tehnologiilor pentru crearea unui robot-exoschelet pentru reabilitarea persoanelor cu funcții musculo-scheletice afectate și chirurgia asistată de robot printre prioritățile dezvoltarea științifică și tehnologică a Rusiei este pe deplin justificată. LITERATURĂ 1. Kraevsky S.V., Rogatkin D.A. Robotica medicala: primii pasi ai robotilor medicali//Tehnologii ale sistemelor vii. 2010. - V. 7. - Nr. 4. - S. 3-14. 2. Raport expert-analitic „Potențialul inovațiilor rusești pe piața sistemelor de automatizare și robotică”. 2014. Raportul a fost întocmit de SRL Larza la ordinul RVC OJSC. Http://www.rusventure.ru/ru/programm/analy-tics/docs/Otchet_robot-FINAL%>20291014.pdf. 3. Cercetarea de piață a transparenței. Piața sistemelor robotice medicale (roboți chirurgicali, sisteme robotizate de radiochirurgie neinvazivă, proteze și exoschelete, roboți de asistență și reabilitare, robotică non-medicală în spitale și sisteme robotice de răspuns la urgențe) - Analiză globală a industriei, dimensiune, cotă, creștere, Tendințe și prognoze 2012-2018. - http://www.transparencymarketresearch.com/medical-robotic-systems.html. 4. Ar putea Titan Medical să asculte piața de chirurgie robotică? 27 martie 2014 de Alpha Deal Group LLC. - http://alphanow.thomsonreuters.com/2014/03/titan-storm-robotic-surgery-market/# 5. Piața roboților de reabilitare până în 2021 - http://robolovers.ru/robots/post/783338/ry-nok_reabilitatsionnyh_robotov_do_2021_goda/ 6. Kurakova N.G., Zinov V.G., Tsvetkova L.A., Eremchenko O.A., Komarova A.V., Komarov V.M., Sorokina A.V., Pavlov P.N. , Kotsyubinsky V.A. Modelul științei „răspuns rapid” în Federația Rusă: metodologie și organizare. - M.: Editura „Delo” RANEPA, 2014. - 160 p. 1. Kraevskij S.V, Rogatkin D.A. Robototronica medicala: primii pasi ai robotilor medicali // Tehnologii ale sistemelor vii. - 2010. - Este. 7. - Nr. 4. - P. 3-14. 2. Raport expert-analitic „Potențialul inovațiilor rusești pe piața automatizării și ECONOMIA ŞTIINŢEI 201 5, Vol. 1, Nr. 2_______ robototronics” (2014) Raportul este pregătit de SRL „Larza” în numele SA „RVK”. http://www.rus-venture.ru/ru/programm/analytics/docs/Otchet_robot-FINAL%20291014.pdf. mainstream 3. Cercetarea de piață a transparenței. Piața sistemelor robotice medicale (roboți chirurgicali, sisteme robotizate de radiochirurgie neinvazivă, proteze și exoschelete, roboți de asistență și reabilitare, robotică non-medicală în spitale și sisteme robotizate de răspuns la urgențe) - Analiză globală a industriei, dimensiune, cotă, creștere, tendințe și prognoză 2012-2018. - http://www.transparencymarketrese-arch.com/medical-robotic-systems.html. 4. Ar putea Titan Medical să asculte piața de chirurgie robotică? (2014) Alpha Deal Group LLC. http:// alphanow.thomsonreuters.com/2014/03/ti- tan-storm-robotic-surgery-market/#. 5. Piața roboților de reabilitare până în anul 2021 (2015). http://robolovers.ru/robots/post/783338/ rynok_reabilitatsionnyh_robotov_do_2021_goda/. 6. Kurakova N.G., Zinov V.G., Tsvetkova L.A., Yeremchenko O.A., Komarova A.V., Komarov V.M., Sorokina A.V., Pavlov P.N., Kotsubinskiy V.A. (2014) Model de știință „acțiune directă” în Federația Rusă: metodologie și organizare // Editura „Delo” RANEPA. - 160p. Cercenko O.V., Sheptunov S.A. Chirurgie asistată de robot și exoschelete de roboți pentru reabilitare: lideri tehnologici mondiali și perspective ale Rusiei (Directoarea Programelor Științifice și Tehnice de Stat, Moscova, Rusia; Institutul de Design-Informatică Tehnologică Academia Rusă de Științe, Moscova, Rusia) Rezumat. A fost analizată activitatea de publicare și brevetare în ceea ce privește două domenii în curs de dezvoltare în domeniul robototronicii medicale: roboți-exoschelete pentru reabilitarea persoanelor cu afecțiuni muscolo-scheletice și chirurgia asistată de robot. Au fost identificate discrepanțe în structura fluxurilor de publicații și brevete globale și naționale. Au fost dezvăluite dezavantaje ale inovațiilor străine privind chirurgia asistată de robot, care creează premise pentru promovarea inovațiilor de substituție a importurilor ale inginerilor autohtoni. Cuvinte cheie: chirurgie asistată de robot, roboți-exoschelete pentru reabilitarea persoanelor cu afecțiuni muscolo-scheletice, lideri în tehnologie, abilitate competitivă, analiză scientometrică, analiză de brevete. noua reglementare PLANURI DE CERCETARE ŞTIINŢIFICĂ A RAS ESTE ACUM APROBATE DE FANO Decretul Guvernului Federației Ruse din 29 mai 2015 nr. 522 „Cu privire la anumite probleme de activitate agentie federala organizații științifice și stat federal instituție bugetară„Academia Rusă de Științe” În conformitate cu noile reguli de coordonare a activităților FASO și RAS, aceasta din urmă trebuie să coordoneze cu FASO planurile de cercetare elaborate de organizațiile științifice în cadrul Programului de cercetare științifică fundamentală al Academiilor de Științe de Stat pentru 2013-2020. FASO, în acord cu Academia Rusă de Științe, aprobă programe pentru dezvoltarea organizațiilor științifice, precum și misiuni de stat pentru efectuarea cercetărilor științifice fundamentale și exploratorii ale organizațiilor subordonate agenției. În cazul în care apar neînțelegeri iresolubile între agenție și Academia Rusă de Științe, munca de depășire a acestora este transferată viceprim-ministrului, care coordonează activitatea organelor executive federale pe probleme de politică de stat în domeniul științei. 130 ____________________________________ ECONOMIA ŞTIINŢEI 2015, Vol. 1, Nr. 2 Echipamente precum simulatoarele de reabilitare și fizioterapie sunt folosite în scopuri terapeutice pentru recuperarea pacienților după operații și leziuni, precum și pentru prevenirea tulburărilor funcționale ale organismului. OOO M.P.A. medical partners” oferă echipamente de reabilitare și fizioterapie de înaltă tehnologie ale unor mărci de renume mondial. De asemenea, realizam proiectarea de incaperi specializate in spitale, clinici, sanatorie, centre sportive, cluburi de fitness si service post-vanzare de echipamente de antrenament. Studenții, studenții absolvenți, tinerii oameni de știință care folosesc baza de cunoștințe în studiile și munca lor vă vor fi foarte recunoscători. Luarea în considerare a principiului de funcționare a robotului medical „Da Vinci”, care permite chirurgilor să efectueze operații complexe fără a atinge pacientul și cu afectarea minimă a țesuturilor acestuia. Utilizarea roboților și a nanotehnologiilor moderne în medicină și semnificația lor. rezumat, adăugat la 01.12.2011 Descrierea istoriei dezvoltării roboticii și a aplicării acesteia în operații chirurgicale pe exemplul unui manipulator Da Vinci automat controlat de program cu un instrument Endo Wrist. Crearea unei capsule plutitoare cu o cameră și sistemul endoluminal ARES. rezumat, adăugat 06.07.2011 Prelucrarea corectă și la timp a mâinilor ca garanție a siguranței personalului medical și a pacienților. Nivele de tratament al mâinilor: gospodăresc, igienic, chirurgical. Cerințe de bază pentru dezinfectanții pentru mâini. Standard european pentru tratarea mâinilor EN-1500. prezentare, adaugat 24.06.2014 Aplicarea în medicină a dispozitivelor microscopice bazate pe nanotehnologii. Crearea de microdispozitive pentru lucrul în interiorul organismului. Metode de biologie moleculară. Senzori și analizoare nanotehnologice. Recipiente pentru livrarea medicamentelor și terapie celulară. rezumat, adăugat 03.08.2011 Acordarea primului ajutor în caz de accidente, dezastre și accidente. Reguli generale pentru transportul și ridicarea victimelor pe targi și fără ele pentru diferite leziuni traumatice. Metode de îndepărtare a victimelor de la sursa unui dezastru sau accident. rezumat, adăugat 27.02.2009 Etiologia, pato- și morfogeneza cancerului rectal. Markerii oncogenezei, semnificația lor prognostică. Principalele criterii de evaluare a rezultatelor studiilor imunohistochimice și a rezultatelor stării PKK la pacienții după tratament chirurgical radical. teză, adăugată 19.05.2013 caracteristici generaleși caracteristici distinctive ale diferitelor metode de examinare a pacienților utilizate în medicina modernă. Procedura și instrumentele pentru efectuarea sondajului. Conceptul și cauzele, varietăți de dificultăți de respirație, direcții de cercetare. rezumat, adăugat 02.12.2013 Varietatea intereselor și talentelor lui Leonardo da Vinci. Efectuarea disecțiilor anatomice de către artist, realizarea unui sistem de imagini ale organelor și părților corpului în secțiune transversală. Cercetări în domeniul anatomiei comparate, conținutul înregistrărilor din jurnal. prezentare, adaugat 28.10.2013Echipamente pentru reabilitare in firma noastra
Trimiteți-vă munca bună în baza de cunoștințe este simplu. Foloseste formularul de mai jos
Documente similare